一种无人驾驶农机控制装置的制作方法
本发明属于农机控制领域,具体地说是一种无人驾驶农机控制装置。
背景技术:
1、舵机是一种常用的电动执行器,用于控制物体的方向或位置。它由一个电动机和一对齿轮组成,可以将电信号转化为机械运动。舵机通常用于模型飞机、船舶、汽车和机器人等设备中,用于控制舵面、舵轮或其他运动部件的位置。
2、目前小型农机主要是手扶式农机为主,大型农机主要是通过方向盘与操作杆控制。无论是手扶式农机还是乘坐式操作杆农机,在操作其作业时都需要人为与农机直接接触并手动操纵;农机的使用环境恶劣,一般都是在炎热的天气下干活,加上手扶农机一直需要人在用力去扶正,人不能脱离农机,一直跟农机走,且时刻通过离合调整行走路线,长时间操作,人容易疲劳,在疲劳的情况下容易产生安全事故。
3、为此,本领域技术人员提出了一种无人驾驶农机控制装置来解决背景技术提出的问题。
技术实现思路
1、为了解决上述技术问题,本发明提供一种无人驾驶农机控制装置,以解决现有技术中扶农机一直需要人在用力去扶正,人不能脱离农机,一直跟农机走,且时刻通过离合调整行走路线,长时间操作,人容易疲劳,在疲劳的情况下容易产生安全事故等问题。
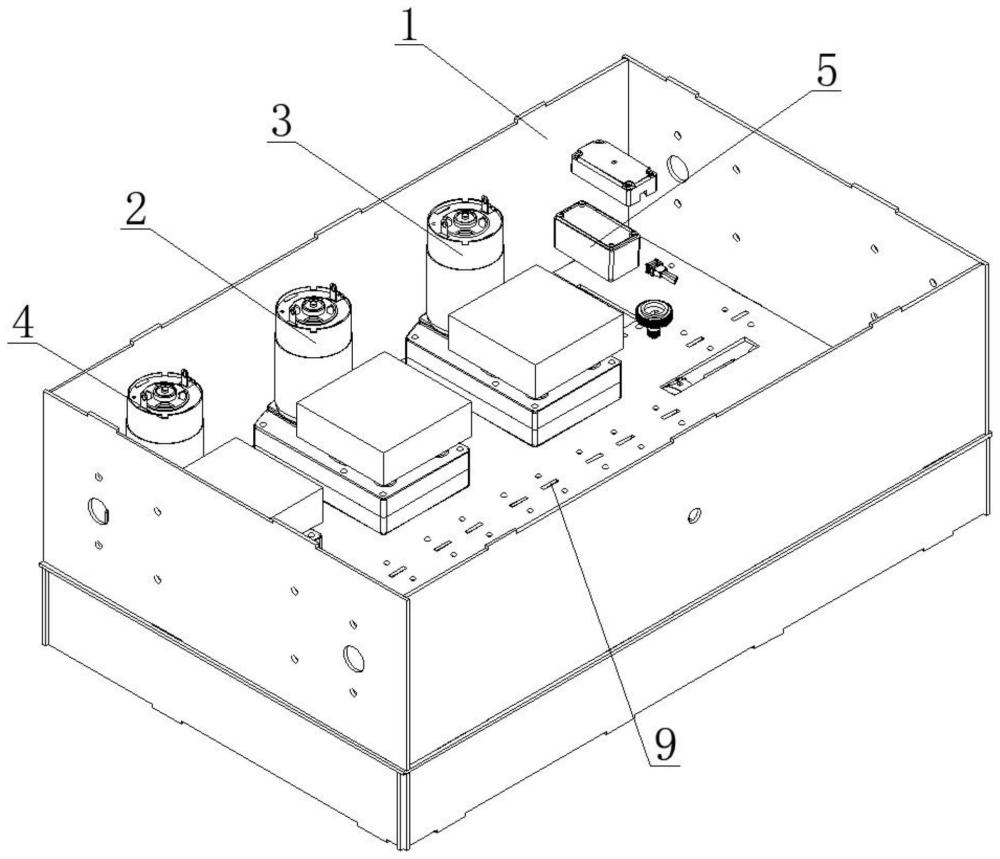
2、一种无人驾驶农机控制装置,包括机械安装箱,所述机械安装箱内部安装有舵机组、降压器、pwm信号控制继电器、定位系统、天线、航模接收机、pix开源飞控、数传、图传系统等,舵机组输出端置于机械安装箱内,且舵机组输出端安装有舵机摇臂;
3、所述舵机组包括第一舵机、第二舵机、第三舵机和油门舵机,所述第一舵机、第二舵机和第三舵机输出端均设置有安装盘,所述第一舵机、第二舵机和第三舵机通过安装盘安装不同型号的舵机摇臂,所述舵机摇臂周侧面开设有行程槽;所述行程槽与农机传动系统控制装置之间安装连接部件。
4、原农机离合是通过收捏或者脚踩的,手扶式农机的转向是通过农机手把左右两个离合器控制的,该装置通过舵机控制连接部件来实现农机离合;通过遥控器遥控操作第二舵机和第三舵机,实现农机离合的控制;通过控制第一舵机,通过舵机摇臂转动倾角调节,舵机摇臂通过连接部件带动农机转向结构转动,实现农机的转向操作。
5、优选的,所述第一舵机位于第二舵机和第三舵机之间,且第一舵机输出端安装的舵机摇臂周侧对称设置有两组行程槽。
6、优选的,所述连接部件为钢丝拉线或拉杆,所述拉杆一端铰接有连接部,拉杆通过连接部与农机传动系统控制装置连接,所述第一舵机处舵机摇臂安装两组钢丝拉线,第一舵机控制农机转向;所述第二舵机处舵机摇臂安装钢丝拉线,第二舵机控制农机行走(工作)离合器;所述第三舵机处舵机摇臂安装钢丝拉线,第三舵机控制农机第二离合器(如旋耕,或者收割,液压升降等)。
7、通过上述技术方案,通过第二舵机和第三舵机控制农机离合器,第一舵机控制农机转向,换挡舵机控制农机换挡。
8、优选的,所述油门舵机输出端安装有摇杆,摇杆处安装钢丝拉线。
9、通过上述技术方案,通过油门舵机带动摇杆转动,摇杆牵引钢丝拉线,用于控制农机的油门。
10、优选的,所述机械安装箱内壁开设有若干安装槽,安装槽位置与舵机安装位相适,安装槽处安装有钢丝拉线固定器,所述钢丝拉线固定器侧壁开设有若干固线孔,所述钢丝拉线固定器上下两端面均固定连接有若干安装块,所述安装块与安装槽卡装配合。
11、通过上述技术方案,通过钢丝拉线固定器对钢丝拉线进行限位,保证钢丝拉线的位置稳定。
12、优选的,所述舵机组包括还包括换挡舵机,所述换挡舵机输出端安装舵机摇臂,所述换挡舵机通过控制舵机摇臂带动拉杆移动控制农机换挡。
13、通过上述技术方案,通过遥控器遥控操作换挡舵机,换挡舵机分为三挡开关,三挡开关打到最低位时舵机摇臂旋转到最低位,三挡开关打到最高位时舵机摇臂旋转到最高位置,三挡开关打到中间位置时舵机摇臂旋转位置刚好在最高位置与最低位置的中间;由于农机的变速箱换挡杆是最高位置和最低位置为前进挡和倒挡,中间位置为空挡,通过换挡舵机和舵机摇臂可以直接农机换挡,实现农机换挡操作。
14、优选的,所述机械安装箱分为三层,顶层安装天线、定位系统、航模接收机,中层安装舵机组和舵机摇臂,机械安装箱中层处侧壁开设有通槽,所述钢丝拉线由通槽穿出,机械安装箱底层安装降压器、pwm信号控制继电器、定位系统、p ix开源飞控等。
15、与现有技术相比,本发明具有如下有益效果:
16、本发明通过遥控器或者mp地面站可以直接控制舵机组控制农机离合器、农机转向、农机换挡和农机的油门,解决了农机的远程无人驾驶问题,通过遥控控制实现农机的作业功能,大大提高了安全性,减轻了劳动力。
技术特征:
1.一种无人驾驶农机控制装置,其特征在于,包括机械安装箱(1),所述机械安装箱(1)内部安装有舵机组、降压器、pwm信号控制继电器、定位系统、天线、航模接收机、pix开源飞控、数传、图传系统等,舵机组输出端置于机械安装箱(1)内,且舵机组输出端安装有舵机摇臂(201);
2.如权利要求1所述一种无人驾驶农机控制装置,其特征在于:所述第一舵机(2)位于第二舵机(3)和第三舵机(4)之间,且第一舵机(2)输出端安装的舵机摇臂(201)周侧对称设置有两组行程槽。
3.如权利要求1或2所述一种无人驾驶农机控制装置,其特征在于:所述连接部件为钢丝拉线(7)或拉杆(10),所述拉杆(10)一端铰接有连接部(11),拉杆(10)通过连接部(11)与农机传动系统控制装置连接,所述第一舵机(2)处舵机摇臂(201)安装两组钢丝拉线(7),第一舵机(2)控制农机转向;所述第二舵机(3)处舵机摇臂(201)安装钢丝拉线(7),第二舵机(3)控制农机行走(工作)离合器;所述第三舵机(4)处舵机摇臂(201)安装钢丝拉线(7),第三舵机(4)控制农机第二离合器。
4.如权利要求3所述一种无人驾驶农机控制装置,其特征在于:所述油门舵机(5)输出端安装有摇杆(6),摇杆(6)安装钢丝拉线(7)。
5.如权利要求4所述一种无人驾驶农机控制装置,其特征在于:所述机械安装箱(1)内壁开设有若干安装槽(9),安装槽(9)位置与舵机安装位相适,安装槽(9)处安装有钢丝拉线固定器(8),所述钢丝拉线固定器(8)侧壁开设有若干固线孔(802),所述钢丝拉线固定器(8)上下两端面均固定连接有若干安装块(801),所述安装块(801)与安装槽(9)卡装配合。
6.如权利要求4所述一种无人驾驶农机控制装置,其特征在于:所述舵机组包括还包括换挡舵机,所述换挡舵机输出端安装舵机摇臂(201),所述换挡舵机通过控制舵机摇臂(201)带动拉杆(10)移动控制农机换挡;换挡舵机外置于机械安装箱(1)。
7.如权利要求4所述一种无人驾驶农机控制装置,其特征在于:所述机械安装箱(1)分为三层,顶层安装天线、定位系统,中层安装舵机组和舵机摇臂(201),机械安装箱(1)中层处侧壁开设有通槽,所述钢丝拉线(7)由通槽穿出,机械安装箱(1)底层安装降压器、pwm信号控制继电器、pix开源飞控、航模接收机、数传、图传系统等。
技术总结
本发明属于农机控制领域,提供了一种无人驾驶农机控制装置,包括机械安装箱,机械安装箱内部安装有舵机组、降压器、PWM信号控制继电器、定位系统、天线、航模接收机、PIX开源飞控、数传、图传系统等,舵机组输出端置于机械安装箱内,且舵机组输出端安装有舵机摇臂;舵机组包括第一舵机、第二舵机、第三舵机和油门舵机,第一舵机、第二舵机和第三舵机安装舵机摇臂,舵机摇臂周侧面开设有行程槽;行程槽与农机传动系统控制装置之间安装连接部件;本发明通过遥控器或者MP地面站可以直接控制舵机组控制农机离合器、农机转向、农机换挡和农机的油门,解决了农机的远程无人驾驶问题,通过遥控控制实现农机的作业功能,大大提高了安全性,减轻了劳动力。
技术研发人员:申小成
受保护的技术使用者:贵州省科技创新中心有限责任公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!