一种基于卷积神经网络的无人机巡检方法及系统与流程
本发明涉及无人机巡检,具体为一种基于卷积神经网络的无人机巡检方法及系统。
背景技术:
1、卷积神经网络是一类包含卷积计算且具有深度结构的前馈神经网络,是深度学习的代表算法之一;卷积神经网络具有表征学习能力,能够按其阶层结构对输入信息进行平移不变分类,因此也被称为“平移不变人工神经网络;在二十一世纪后,随着深度学习理论的提出和数值计算设备的改进,卷积神经网络得到了快速发展,并被应用于计算机视觉、自然语言处理等领域;卷积神经网络仿造生物的视知觉机制构建,可以进行监督学习和非监督学习,其隐含层内的卷积核参数共享和层间连接的稀疏性使得卷积神经网络能够以较小的计算量对格点化特征,例如像素和音频进行学习、有稳定的效果且对数据没有额外的特征工程要求;传统自巡航无人机在输电线路巡航过程中识别处理模块较慢,且在特殊环境和情况传输出的数据不够稳定;输电线路存在特殊情况时,无人机报错时常存在误报的现象,损耗人力物力检查,造成人力资源浪费。
2、为此,本发明提出一种基于卷积神经网络的无人机巡检方法及系统用于解决上述问题。
技术实现思路
1、本发明的目的在于提供一种基于卷积神经网络的无人机巡检方法及系统,以解决上述背景技术中提出的问题。
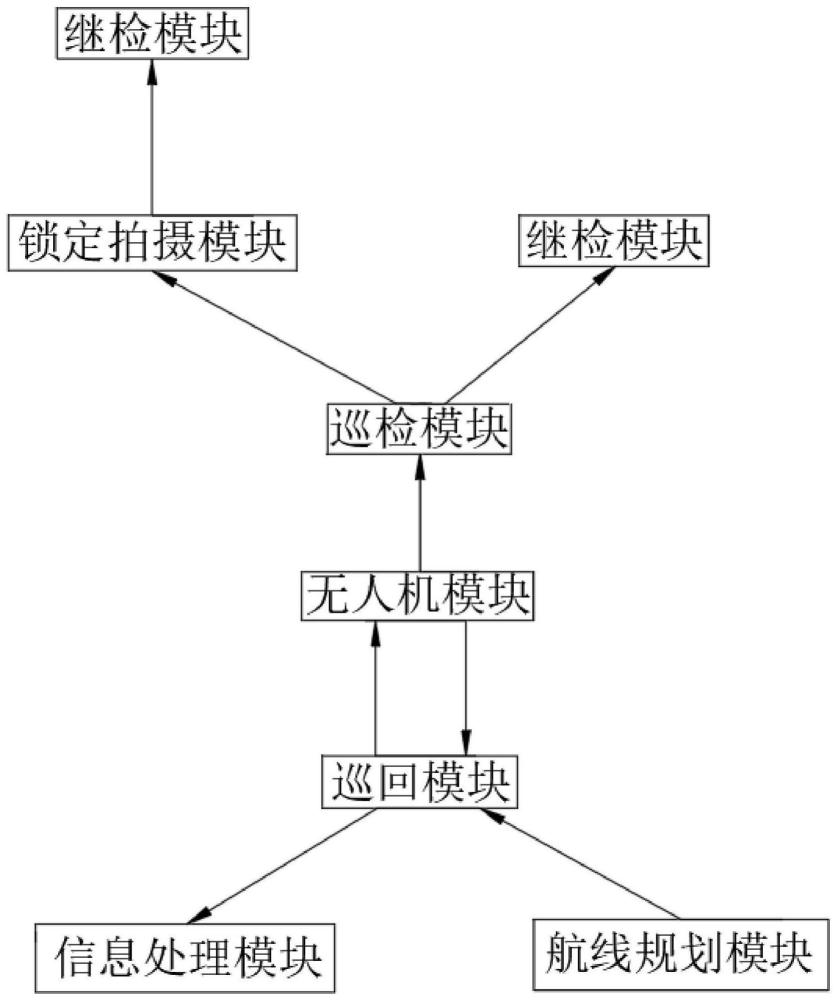
2、为实现上述目的,本发明提供如下技术方案:一种基于卷积神经网络的无人机巡检方法,包括巡回模块、无人机模块、巡检模块和航线规划模块;所述巡回模块接收航线规划模块发出的任务,所述巡回模块执行任务传导至无人机模块,所述无人机模块执行巡检模块,所述巡检模块完成任务后传输信号给无人机模块,所述无人机模块传输信号给巡回模块,完成精准降落。
3、优选的,所述巡检模块执行继检模块,所述巡检模块执行锁定拍摄模块后继续执行继检模块,所述巡回模块传输数据至信息处理模块,所述信息处理模块传输数据至检查模块,所述检查模块分类传送至云保存模块和图片生成模块,所述图片生成模块传输至故障报错模块。
4、优选的,所述无人机模块包含有防坠机模块、散热模块、稳定模块和追踪模块。
5、优选的,所述图片生成模块继续传输回检查模块,所述检查模块二次检查后传输回图片生成模块。
6、优选的,所述防坠机模块用于控制无人机进行动作,防止其坠落。
7、优选的,所述散热模块适配晴天工作的无人机模块。
8、优选的,所述稳定模块适配大风天工作的无人机模块。
9、优选的,所述追踪模块适配无人机模块的实时追踪和意外坠落。
10、一种系统,包括一种基于卷积神经网络的无人机巡检方法。
11、与现有技术相比,本发明的有益效果是:
12、在输电线路巡航过程中,智能识别尤为重要,通过卷积神经网络处理的巡检模块,可以帮助无人机模块对拍摄数据进行极快的特征和信息处理,且在特殊环境和情况下更加稳定;在输电线路中巡检时有各种特殊情况,可以通过无人机模块的防坠机模块、散热模块、稳定模块和追踪模块解决大多数特殊情况对无人机模块的损坏;在输电线路巡航过程中,存在特殊情况需要拍摄录像时,锁定拍摄功能开始运作,设备锁定功能可以即时校正并调整无人机的飞行轨迹,确保飞行的准确性和稳定性;并且在锁定目标后,无人机模块将执行环绕飞行功能,对目标各个方位进行拍摄录制;通过图片生成模块继续传输回检查模块,检查模块二次检查后传输回图片生成模块,减少误报的情况。
技术特征:
1.一种基于卷积神经网络的无人机巡检方法,其特征在于:包括巡回模块、无人机模块、巡检模块和航线规划模块;所述巡回模块接收航线规划模块发出的任务,所述巡回模块执行任务传导至无人机模块,所述无人机模块执行巡检模块,所述巡检模块完成任务后传输信号给无人机模块,所述无人机模块传输信号给巡回模块,完成精准降落。
2.根据权利要求1所述的一种基于卷积神经网络的无人机巡检方法,其特征在于:所述巡检模块执行继检模块,所述巡检模块执行锁定拍摄模块后继续执行继检模块,所述巡回模块传输数据至信息处理模块,所述信息处理模块传输数据至检查模块,所述检查模块分类传送至云保存模块和图片生成模块,所述图片生成模块传输至故障报错模块。
3.根据权利要求1所述的一种基于卷积神经网络的无人机巡检方法,其特征在于:所述无人机模块包含有防坠机模块、散热模块、稳定模块和追踪模块。
4.根据权利要求2所述的一种基于卷积神经网络的无人机巡检方法,其特征在于:所述图片生成模块继续传输回检查模块,所述检查模块二次检查后传输回图片生成模块。
5.根据权利要求3所述的一种基于卷积神经网络的无人机巡检方法,其特征在于:所述防坠机模块用于控制无人机进行动作,防止其坠落。
6.根据权利要求3所述的一种基于卷积神经网络的无人机巡检方法,其特征在于:所述散热模块适配晴天工作的无人机模块。
7.根据权利要求3所述的一种基于卷积神经网络的无人机巡检方法,其特征在于:所述稳定模块适配大风天工作的无人机模块。
8.根据权利要求3所述的一种基于卷积神经网络的无人机巡检方法,其特征在于:所述追踪模块适配无人机模块的实时追踪和意外坠落。
9.一种如权利要求1-8任意一项所述基于卷积神经网络的无人机巡检系统,其特征在于,该巡检系统为:航线规划模块发布准确任务,巡回模块执行命令,将无人机模块派出执行巡检模块,遇特殊情况执行锁定拍摄模块;最后将所有数据传回信息处理模块。
技术总结
本发明公开了一种基于卷积神经网络的无人机巡检方法及系统,包括巡回模块、无人机模块、巡检模块和航线规划模块;所述巡回模块接收航线规划模块发出的任务,所述巡回模块执行任务传导至无人机模块,所述无人机模块执行巡检模块,所述巡检模块完成任务后传输信号给无人机模块;在输电线路巡航过程中,由卷积神经网络处理的巡检模块,可以快速识别物体的特征和信息,且特殊环境和情况下更加稳定;输电线路巡航发现特殊情况时,由图片生成模块继续传输回检查模块,检查模块二次检查后传输回图片生成模块,减少误报的情况;由无人机模块的防坠机模块、散热模块、稳定模块和追踪模块解决大多数特殊情况对无人机模块在输电线路巡航时产生的损坏。
技术研发人员:程永生,李睿,张益霖,杨松,丁铎,杜冰,聂琛,沈俊吉,周劲松
受保护的技术使用者:国网吉林省电力有限公司超高压公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!