基于改进正余弦算法的无人机路径规划方法和装置与流程
本发明涉及无人机,具体涉及一种基于改进正余弦算法的无人机路径规划方法和装置。
背景技术:
1、无人机 (uav) 是一种现代航空装备,由于其可以执行远程和危险环境中危险、重复性的工作,也是未来战争潜在的必然趋势之一。无人机航路规划问题的目标是满足特定的约束条件下,在初始位置和所需的目的地之间寻找一条具有最小威胁代价的最优或接近最优的飞行路径。近年来,在军用和民用领域,无人机航路规划问题都得到了广泛的研究。部分智能算法已经在该问题中得到了应用,比如cn115016499a公开了一种基于sca-ql的路径规划方法,其中公开了通过改进正余弦算法与其他算法结合求解无人机最优解,然而上述算法仍然存在迭代时收敛速度慢,且容易陷入局部最优的问题。
技术实现思路
1、鉴于上述问题,提出了本发明以便提供一种克服上述问题或者至少部分地解决上述问题的基于改进正余弦算法的无人机路径规划方法和装置。
2、依据本发明的一个方面,提供了一种基于改进正余弦算法的无人机路径规划方法,所述方法包括:
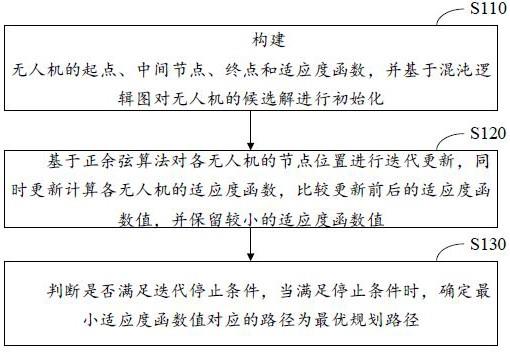
3、构建无人机的起点、中间节点、终点和适应度函数,并基于混沌逻辑图对无人机的候选解进行初始化;
4、基于正余弦算法对各无人机的节点位置进行迭代更新,同时更新计算各无人机的适应度函数,比较更新前后的适应度函数值,并保留较大的适应度函数值;
5、判断是否满足迭代停止条件,当满足停止条件时,确定最大适应度函数值对应的路径为最优规划路径。
6、在一些实施方式中,基于混沌逻辑图对无人机的候选解进行初始化包括:
7、基于混沌逻辑图公式生成一个混沌变量向量;假设yj为第j个混沌变量,µ为分岔系数,则所述混沌逻辑图公式为:
8、
9、重复上述步骤,为每个候选解生成一个对应的混沌变量向量;
10、基于混沌变量向量和对应变量的上下边界初始化所述候选解。
11、在一些实施方式中,所述方法还包括:
12、所述正余弦算法的迭代公式中包括控制参数r1,将如下的r1公式替换到所述正余弦算法的迭代公式中:
13、
14、其中,自定义参数,t是当前迭代次数,maxiteration最大迭代次数,是r1的最大值。
15、在一些实施方式中,所述方法还包括:
16、在所述正余弦算法的迭代公式中引入收敛因子cf,所述收敛因子用于对所述迭代公式中的初始位置进行限定:
17、。
18、在一些实施方式中,所述适应度函数为综合成本的倒数,所述综合成本包括如下的至少一项:路径成本、障碍物威胁成本、雷达威胁成本、导弹威胁成本、防空威胁成本、气候威胁成本、地形威胁成本、最大爬升角成本、最大高度成本或无人机相互碰撞成本。
19、在一些实施方式中,判断是否满足迭代停止条件包括:
20、判断迭代次数是否等于最大迭代次数,或者判断所述适应度函数值是否小于或等于预设阈值,若上述两个判断任一个结果为是则停止迭代。
21、在一些实施方式中,所述方法还包括:
22、利用b样条差值曲线平滑所述最优路径。
23、依据本发明的另一个方面,提供了一种基于改进正余弦算法的无人机路径规划装置,所述装置包括:
24、初始化模块,适于构建无人机的起点、中间节点、终点和适应度函数,并基于混沌逻辑图对无人机的候选解进行初始化;
25、迭代模块,适于基于正余弦算法对各无人机的节点位置进行迭代更新,同时更新计算各无人机的适应度函数,并保留较大的适应度函数值;
26、规划模块,适于判断是否满足迭代停止条件,当满足停止条件时,确定最大适应度函数值对应的路径为最优规划路径。
27、依据本发明的又一方面,提供了一种无人机,包括:处理器以及被安排成存储计算机可执行指令的存储器,所述可执行指令在被执行时使所述处理器执行根据上述实施方式中任一项所述的基于改进正余弦算法的无人机路径规划方法。
28、依据本发明的再一方面,提供了一种计算机可读存储介质,其中,所述计算机可读存储介质存储一个或多个程序,所述一个或多个程序当被处理器执行时,实现根据上述中任一项基于改进正余弦算法的无人机路径规划方法。
29、由上述可知,根据本发明公开的基于改进正余弦算法的无人机路径规划方法,首先初始化或构建无人机的起点、中间节点、终点和适应度函数,并基于混沌逻辑图对无人机的候选解进行初始化;然后,基于正余弦算法对各无人机的节点位置进行迭代更新,同时更新计算各无人机的适应度函数,比较更新前后的适应度函数值,并保留较大的适应度函数值;最后,判断是否满足迭代停止条件,当满足停止条件时,确定最大适应度函数值对应的路径为最优规划路径。上述方案实现了基于混沌的种群初始化,以获得更好的一致性,能够更精确地为无人机生成最优路径,且收敛速度快。
30、进一步的,本发明还使用非线性递减的步长来平衡局部和全局搜索;此外,还增加了收敛因子,提高了sca的收敛速度,能够更精确地为无人机生成最优路径。
31、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
技术特征:
1.一种基于改进正余弦算法的无人机路径规划方法,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,基于混沌逻辑图对无人机的候选解进行初始化包括:
3.根据权利要求1所述的方法,其特征在于,所述方法还包括:
4.根据权利要求3所述的方法,其特征在于,所述方法还包括:
5.根据权利要求1所述的方法,其特征在于,所述适应度函数为综合成本的倒数,所述综合成本包括如下的至少一项:路径成本、障碍物威胁成本、雷达威胁成本、导弹威胁成本、防空威胁成本、气候威胁成本、地形威胁成本、最大爬升角成本、最大高度成本或无人机相互碰撞成本。
6.根据权利要求1所述的方法,其特征在于,判断是否满足迭代停止条件包括:
7.根据权利要求1-6中任一项所述的方法,其特征在于,所述方法还包括:
8.一种基于改进正余弦算法的无人机路径规划装置,所述装置包括:
9.一种无人机,其特征在于,包括处理器以及被安排成存储计算机可执行指令的存储器,所述可执行指令在被执行时使所述处理器执行根据权利要求1-7中任一项所述的基于改进正余弦算法的无人机路径规划方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储一个或多个程序,所述一个或多个程序当被处理器执行时,实现根据权利要求1-7中任一项所述的基于改进正余弦算法的无人机路径规划方法。
技术总结
本发明公开了一种基于改进正余弦算法的无人机路径规划方法和装置,所述方法包括:构建无人机的起点、中间节点、终点和适应度函数,并基于混沌逻辑图对无人机的候选解进行初始化;基于正余弦算法对各无人机的节点位置进行迭代更新,同时更新计算各无人机的适应度函数,比较更新前后的适应度函数值,并保留较大的适应度函数值;判断是否满足迭代停止条件,当满足停止条件时,确定最大适应度函数值对应的路径为最优规划路径。上述方案通过优化无人机种群初始化,提高了最终解的收敛速度和质量。
技术研发人员:任雪峰
受保护的技术使用者:北京卓翼智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!