一种履带车轨迹跟踪方法、终端设备及存储介质与流程
本发明涉及轨迹跟踪领域,尤其涉及一种履带车轨迹跟踪方法、终端设备及存储介质。
背景技术:
1、轨迹跟踪的目的是在车辆行驶过程中实时调整被控对象状态使其实际行驶轨迹尽量贴合规划轨迹,其方法一般是实时采集车辆位置状态信息,对比规划轨迹,通过一定规则得到控制量并作用于被控对象,是一种反馈调节。轨迹跟踪一般是局部规划,需要实时考虑被控对象特征、运动状态、控制量约束等条件,实现的是某时刻的局部最优。
2、车辆模型是进行轨迹跟踪的基础,通常以两种方式参与车辆的行驶控制:仿真中模拟车辆响应和评估控制器性能、轨迹跟踪控制器设计中提供车辆反馈。其中,控制器开发时为减少计算量,通常使用线性化车辆模型来生成控制规则。常见的履带车模型有两种,首先是利用与车辆几何特征相关的位置、速度、加速的等参数解释车辆如何移动的运动学模型,在此基础上考虑车辆运动时的内力、惯性、能量等力学参数,从而获得理论输入与实际输出关系,即是车辆的动力学模型。无滑移滑转的运动学模型,由于履带特殊的运动方式,该模型的适用场景非常局限。滑移转向履带车综合模型可以很好地适配履带车转向问题,但在穿越复杂地形时需要对其参数进行自适应调整。由于履带车本身动力学模型的复杂性,其轨迹跟踪技术发展相比于传统车辆较为落后。
3、近年来模型预测算法(model prediction control,mpc)由于其优秀的多约束处理能力在车辆轨迹跟踪领域得到了广泛应用,然而其在履带车的控制应用上却仍面临诸多问题。mpc根据系统过去的运行状态预测未来一段时间内的系统状态,通过滚动优化在每一时刻求解一个开环优化问题,其本质是对于优化问题的求解,优点在于其能够方便地处理多约束问题,但是其计算量会随着车辆动力学模型复杂程度的提高迅速上升。有研究人员采用点质量模型来降低非线性车辆动力学产生的计算复杂性,但在轨迹规划阶段的模型简化极易导致跟踪时的模型误差过大而失效。
技术实现思路
1、为了解决上述问题,本发明提出了一种履带车轨迹跟踪方法、终端设备及存储介质。
2、具体方案如下:
3、一种履带车轨迹跟踪方法,包括以下步骤:
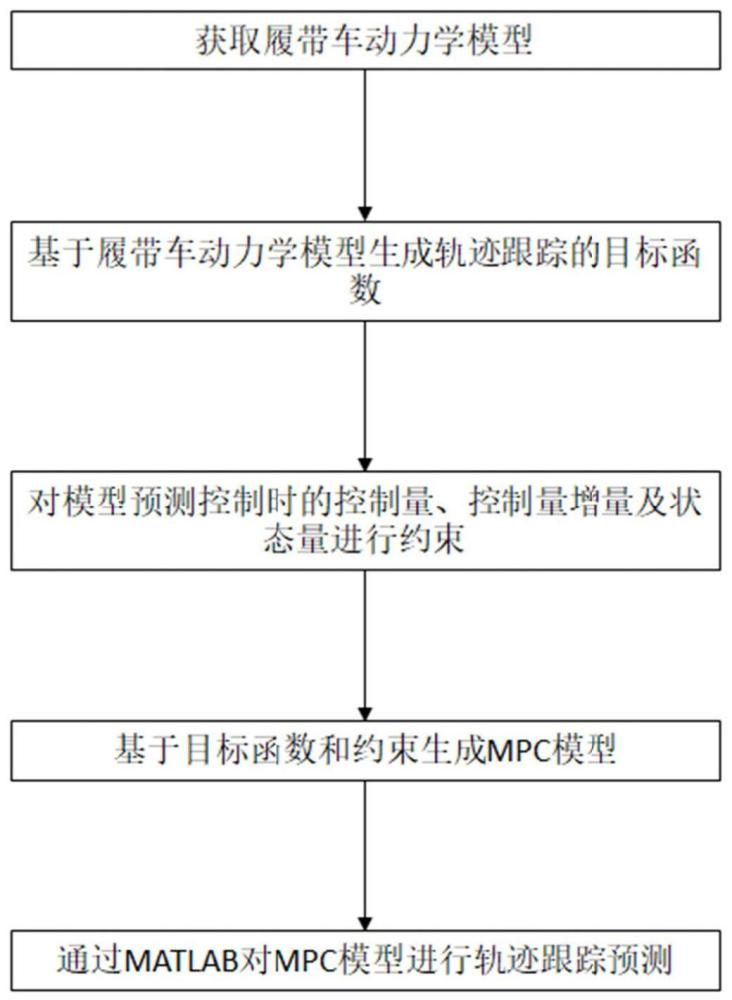
4、s1:获取履带车动力学模型;
5、s2:基于履带车动力学模型生成轨迹跟踪的目标函数;
6、s3:对模型预测控制时的控制量、控制量增量及状态量进行约束;
7、s4:基于目标函数和约束生成mpc模型;
8、s5:通过matlab对mpc模型进行轨迹跟踪预测。
9、进一步的,预测控制采用非线性模型,则生成的目标函数为:
10、
11、其中,j(k)表示k时刻的目标函数,np表示预测步长的数量,nc表示控制步长的数量,i表示个数变量,r和q均表示权重系数矩阵,χ(k+i)表示k+i时刻的状态量,χref(k+i)表示k+i时刻的期望状态量,δu(k+i)表示k+i时刻的控制增量,ρ表示权重系数,ε表示松弛因子。
12、进一步的,预测控制采用线性模型,则生成的目标函数为:
13、
14、
15、其中,j(k)表示k时刻的目标函数,np表示预测步长的数量,nc表示控制步长的数量,i表示个数变量,r和q均表示权重系数矩阵,η(k+i)表示k+i时刻的状态量输出,ηref(k+i)表示k+i时刻的期望状态量输出,δu(k+i)表示k+i时刻的控制增量,ρ表示权重系数,ε表示松弛因子,η(k)表示k时刻的状态量输出,表示阶数为nx的单位矩阵,表示k时刻的状态量误差,表示k-1时刻的控制量误差。
16、进一步的,约束条件包括对速度、角速度、加速度、角加速度、左轮速度和右轮速度的约束。
17、进一步的,当采用线性模型时,结合pid进行辅助控制。
18、进一步的,步骤s5中采用基于matlab和coppeliasim的模型联合仿真,在matlab中采用coppeliasim自带的接口对模型进行控制并实时读取模型运动数据,用读取的位置、速度数据作为实际状态量。
19、进一步的,当履带车的履带理论线速度ωr的范围满足[-2.5,2.5]m/s且实际转向角速度ωr的范围满足[-1,1]rad/s时,履带车的动力学模型采用:
20、
21、
22、其中,v1、v2分别表示左右履带理论线速度;b表示左右履带间距;a1、a2分别表示左右履带的转向极;rr表示实际转向半径;
23、否则,履带车动力学模型采用:
24、
25、其中,f表示行驶阻力系数;fω表示车辆转弯时的离心力,fωx和fωy分别表示离心力fω在x轴和y轴的分量;n1和n2分别表示高速侧和低速侧履带的垂直载荷;m1和m2分别表示左、右履带受到的行驶阻力矩;f1x表示低速侧履带受到地面作用力合力在x轴上的分量,f1y表示低速侧履带受到地面作用力合力在y轴上的分量,f2x表示高速侧履带受到地面作用力合力在x轴上的分量,f2y表示高速侧履带受到地面作用力合力在y轴上的分量;d表示转向极纵向偏移量;m1表示低速侧履带受到地面作用力对c′的阻力矩,m2表示高速侧履带受到地面作用力对c′的阻力矩,c′为左右履带转向极连线与车辆中轴线的交点。
26、一种履带车轨迹跟踪终端设备,包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现本发明实施例上述的方法的步骤。
27、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现本发明实施例上述的方法的步骤。
28、本发明采用如上技术方案,提出的履带车轨迹跟踪方法能够贴合履带车实际运动规律,并在非线性模型预测算法的基础上对线性模型预测与pid耦合控制算法进行了探究,在matlab中对两种算法的跟踪能力进行了仿真对比,并采用coppeliasim与matlab联合仿真对两种算法在真实物理场景中的跟踪能力进行了探究。
技术特征:
1.一种履带车轨迹跟踪方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的履带车轨迹跟踪方法,其特征在于:预测控制采用非线性模型,则生成的目标函数为:
3.根据权利要求1所述的履带车轨迹跟踪方法,其特征在于:预测控制采用线性模型,则生成的目标函数为:
4.根据权利要求1所述的履带车轨迹跟踪方法,其特征在于:约束条件包括对速度、角速度、加速度、角加速度、左轮速度和右轮速度的约束。
5.根据权利要求1所述的履带车轨迹跟踪方法,其特征在于:当采用线性模型时,结合pid进行辅助控制。
6.根据权利要求1所述的履带车轨迹跟踪方法,其特征在于:步骤s5中采用基于matlab和coppeliasim的模型联合仿真,在matlab中采用coppeliasim自带的接口对模型进行控制并实时读取模型运动数据,用读取的位置、速度数据作为实际状态量。
7.根据权利要求1所述的履带车轨迹跟踪方法,其特征在于:当履带车的履带理论线速度ωr的范围满足[-2.5,2.5]m/s且实际转向角速度ωr的范围满足[-1,1]rad/s时,履带车的动力学模型采用:
8.一种履带车轨迹跟踪终端设备,其特征在于:包括处理器、存储器以及存储在所述存储器中并在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如权利要求1~7中任一所述方法的步骤。
9.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于:所述计算机程序被处理器执行时实现如权利要求1~7中任一所述方法的步骤。
技术总结
本发明涉及一种履带车轨迹跟踪方法、终端设备及存储介质,该方法中包括:S1:获取履带车动力学模型;S2:基于履带车动力学模型生成轨迹跟踪的目标函数;S3:对模型预测控制时的控制量、控制量增量及状态量进行约束;S4:基于目标函数和约束生成MPC模型;S5:通过MATLAB对MPC模型进行轨迹跟踪预测。本发明提出的履带车轨迹跟踪方法能够贴合履带车实际运动规律。
技术研发人员:刘如诺,熊树生,吴霄峰,陈振华,黄国超,刘文涛,何卫平,陈成辉,江立流,童长斌,上官万春,张昶,陈敏,蔡灼平,杨名锂
受保护的技术使用者:中国水利水电第十六工程局有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!