一种多维体感的矿卡远程驾驶系统的制作方法
本公开涉及矿卡远程驾驶领域,具体而言,涉及一种多维体感的矿卡远程驾驶系统。
背景技术:
1、露天矿无人运输是提高矿山安全生产的重要途径之一,通过将驾驶员撤离矿车和作业现场,以无人驾驶代替有人驾驶的模式,从而达到本质安全的目标。目前,新疆、内蒙古等多个露天矿均引入了无人运输技术。但实际上,无人运输的效率却无法达到有人运输效率,主要原因是:一方面,在装载区涉及到矿卡与铲车频繁“请求-应答”的业务逻辑交互,带来了一定的时间成本;另一方面,在卸载区为了使矿卡能够精准位置、精确姿态的停靠于挡墙,算法中增加了多次规划的步骤,也制约了卸载效率。因此可以认为,装卸载区的作业效率是决定无人运输整体效率的关键。为此,现有一种基于人在回路的智能驾驶模式,对于作业逻辑复杂的装卸载区,采用远程操作矿卡方式,对于路线相对简单的运输路段,采用无人运输方式,既可以保证作业的安全性,也提高了作业效率。据统计,该模式下的作业效率能达到有人模式下的70%以上。从业务流程上看,这种模式下要求驾驶员始终坐在远程驾驶系统上,不断接管进入作业区的矿卡车辆,完成装载或卸载操作。因此,远程驾驶系统与真实矿卡之间存在的差异化程度,将对驾驶员的驾驶体验、甚至是作业效率有着直接影响。现有的远程驾驶系统只能实现作业场景的视频回传,远程操控指令的下发等基础功能,缺少提高驾驶员驾驶体验方面的考虑。
2、现有技术中,基于5g的矿卡远程驾驶控制系统公开了远程驾驶系统的通信方式,重点描述了网络组件、信号采集和通信模块等方面的结构设计,并未设计座舱系统的设计。智能汽车的远程驾驶模拟舱公开了智能汽车的远程驾驶模拟舱,介绍了外观结构及功能,具有视觉和听觉方面体验,缺少体感方面反馈,与实车驾驶仍有很大区别。现有公开专利中多为实用新型专利,重点在于介绍远程驾驶席的外观,但在同时包含视觉、听觉、路感等多维度体感反馈的模拟座舱,目前仍是空白。
3、因此,需要一种或多种方法解决上述问题。
4、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本公开的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本公开的目的在于提供一种多维体感的矿卡远程驾驶系统,进而至少在一定程度上克服由于相关技术的限制和缺陷而导致的一个或者多个问题。
2、根据本公开的一个方面,提供一种多维体感的矿卡远程驾驶系统,包括矿卡端及远程端,其中:
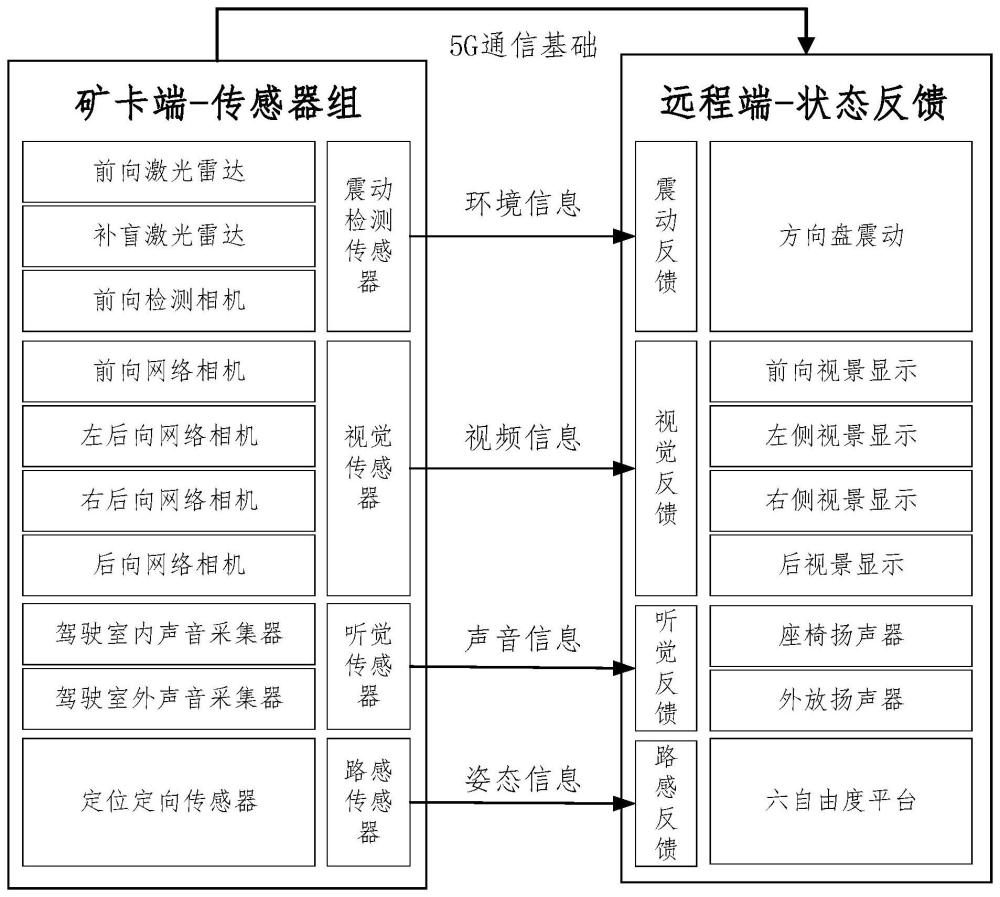
3、所述矿卡端安装在矿卡的预设位置,包括震动检测传感器、视觉传感器、听觉传感器、路感传感器,所述矿卡端用于采集所述矿卡的前向周围环境、车身周围环境、驾驶室内/外声音信息、车身位置及位姿信息;
4、所述远程端用于接收所述矿卡端发送的所述前向周围环境、车身周围环境、驾驶室内/外声音信息、车身位置及位姿信息,并基于所述前向周围环境、车身周围环境、驾驶室内/外声音信息、车身位置及位姿信息进行数据解析处理后,分别在远程端向远程驾驶员展示。
5、在本公开的一种示例性实施例中,所述系统还包括:
6、所述矿卡端的震动检测传感器包括前向激光雷达、补盲激光雷达和前向检测相机;
7、基于所述矿卡端的震动检测传感器采集所述矿卡的前向周围环境并发送至远程端;
8、远程端基于所述前向周围环境进行数据解析处理,生成方向盘震动反馈信号,并基于所述方向盘反馈信号向远程驾驶员震动提醒。
9、在本公开的一种示例性实施例中,所述系统还包括:
10、所述矿卡端的视觉传感器包括前向网络相机、左后向网络相机、右后向网络相机及后向网络相机;
11、基于所述矿卡端的视觉传感器采集车身周围环境并发送至远程端;
12、远程端基于所述车身周围环境进行数据解析处理,分别生成前向视景显示、左后视景显示、右向视景显示、后向视景显示向远程驾驶员展示。
13、在本公开的一种示例性实施例中,所述系统还包括:
14、所述矿卡端的听觉传感器包括驾驶室内声音采集器、驾驶室外声音采集器;
15、基于所述矿卡端的听觉传感器采集其他车辆鸣笛、矿区爆破作业声、设备异响、雷达反馈的驾驶室内/外声音信息并发送至远程端;
16、远程端基于所述驾驶室内/外声音信息进行数据解析处理,并分别通过座椅扬声器及外放扬声器向远程驾驶员展示。
17、在本公开的一种示例性实施例中,所述系统还包括:
18、所述座椅扬声器距远程驾驶员的距离小于所述外放扬声器距远程驾驶员的距离。
19、在本公开的一种示例性实施例中,所述系统还包括:
20、所述矿卡端的路感传感器为定位定向传感器;
21、基于所述矿卡端的路感传感器采集车身位置及位姿信息并发送至远程端;
22、远程端基于所述车身位置及位姿信息进行数据解析处理,生成路感反馈信号,并根据所述路感反馈信号基于所述远程端的六自由度平台向远程驾驶员进行路感反馈。
23、在本公开的一种示例性实施例中,所述系统还包括:
24、所述车身位置及位姿信息包括车身的经度、纬度、高度、俯仰角、偏航角和滚转角。
25、在本公开的一个方面,提供一种多维体感的矿卡远程驾驶系统方法,包括:
26、基于矿卡端采集所述矿卡的前向周围环境、车身周围环境、驾驶室内/外声音信息、车身位置及位姿信息,并将所述前向周围环境、车身周围环境、驾驶室内/外声音信息、车身位置及位姿信息发送至远程端;
27、基于远程端接收所述矿卡端发送的所述前向周围环境、车身周围环境、驾驶室内/外声音信息、车身位置及位姿信息,对所述前向周围环境、车身周围环境、驾驶室内/外声音信息、车身位置及位姿信息进行数据解析处理后,分别在远程端向远程驾驶员展示。
28、本公开的示例性实施例中的一种多维体感的矿卡远程驾驶系统,其中,该多维体感的矿卡远程驾驶系统包括:矿卡端及远程端,所述矿卡端安装在矿卡的预设位置,包括震动检测传感器、视觉传感器、听觉传感器、路感传感器,所述矿卡端用于采集所述矿卡的前向周围环境、车身周围环境、驾驶室内/外声音信息、车身位置及位姿信息;所述远程端用于接收所述矿卡端发送的所述前向周围环境、车身周围环境、驾驶室内/外声音信息、车身位置及位姿信息,并基于所述前向周围环境、车身周围环境、驾驶室内/外声音信息、车身位置及位姿信息进行数据解析处理后,分别在远程端向操作员展示。本公开能多维度感受实车驾驶感受,提高操作员的驾驶质量,提升了生产作业的安全性。
29、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
技术特征:
1.一种多维体感的矿卡远程驾驶系统,其特征在于,所述系统包括矿卡端及远程端,其中:
2.如权利要求1所述的系统,其特征在于,所述系统还包括:
3.如权利要求1所述的系统,其特征在于,所述系统还包括:
4.如权利要求1所述的系统,其特征在于,所述系统还包括:
5.如权利要求1所述的系统,其特征在于,所述系统还包括:
6.如权利要求1所述的系统,其特征在于,所述系统还包括:
7.如权利要求5所述的系统,其特征在于,所述系统还包括:
8.一种多维体感的矿卡远程驾驶方法,其特征在于,所述方法包括:
9.一种电子设备,其特征在于,包括
10.一种计算机可读存储介质,其特征在于,其上存储有计算机程序,所述计算机程序被处理器执行时实现根据权利要求8的方法。
技术总结
本公开是关于一种多维体感的矿卡远程驾驶系统。其中,该多维体感的矿卡远程驾驶系统包括:矿卡端及远程端,所述矿卡端安装在矿卡的预设位置,包括震动检测传感器、视觉传感器、听觉传感器、路感传感器,所述矿卡端用于采集所述矿卡的前向周围环境、车身周围环境、驾驶室内/外声音信息、车身位置及位姿信息;所述远程端用于接收所述矿卡端发送的所述前向周围环境、车身周围环境、驾驶室内/外声音信息、车身位置及位姿信息,并基于所述前向周围环境、车身周围环境、驾驶室内/外声音信息、车身位置及位姿信息进行数据解析处理后,分别在远程端向操作员展示。本公开能多维度感受实车驾驶感受,提高操作员的驾驶质量,提升了生产作业的安全性。
技术研发人员:苑文楠,朱世鹏,刘政达,李大伟,王家璇,邱旭阳,蒋大伟
受保护的技术使用者:北京机械设备研究所
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!