一种考虑自动驾驶仪动态特性的飞行器角度约束制导方法
本发明涉及一种考虑自动驾驶仪动态特性的飞行器角度约束制导方法,属于制导控制领域。
背景技术:
1、对于制导飞行器,自动驾驶仪是指按一定技术要求在飞行中自动控制和稳定飞行器姿态运动的装置。它与飞行器上的或地面的导引装置交联组成飞行器制导和控制系统,主要由敏感元件、计算机和伺服机构组成。当某种干扰将使飞行器姿态失稳时,敏感元件随即检测出姿态的变化,计算机算出需要的修正偏量,伺服机构按所提出的修正信息,操纵飞行器到所需要的姿态位置,以保证稳定飞行。
2、然而,在大气层内飞行的制导飞行器,受空气动力作用,以及飞行器本身硬件设备的延迟特性,自动驾驶仪存在动态延迟,导致制导精度的下降。
3、因此,有必要对制导方法进行更为深入的研究,以降低自动驾驶仪动态延时对制导精度的影响。
技术实现思路
1、为了克服上述问题,本发明人进行了深入研究,提出了一种考虑自动驾驶仪动态特性的飞行器角度约束制导方法,包括以下步骤:
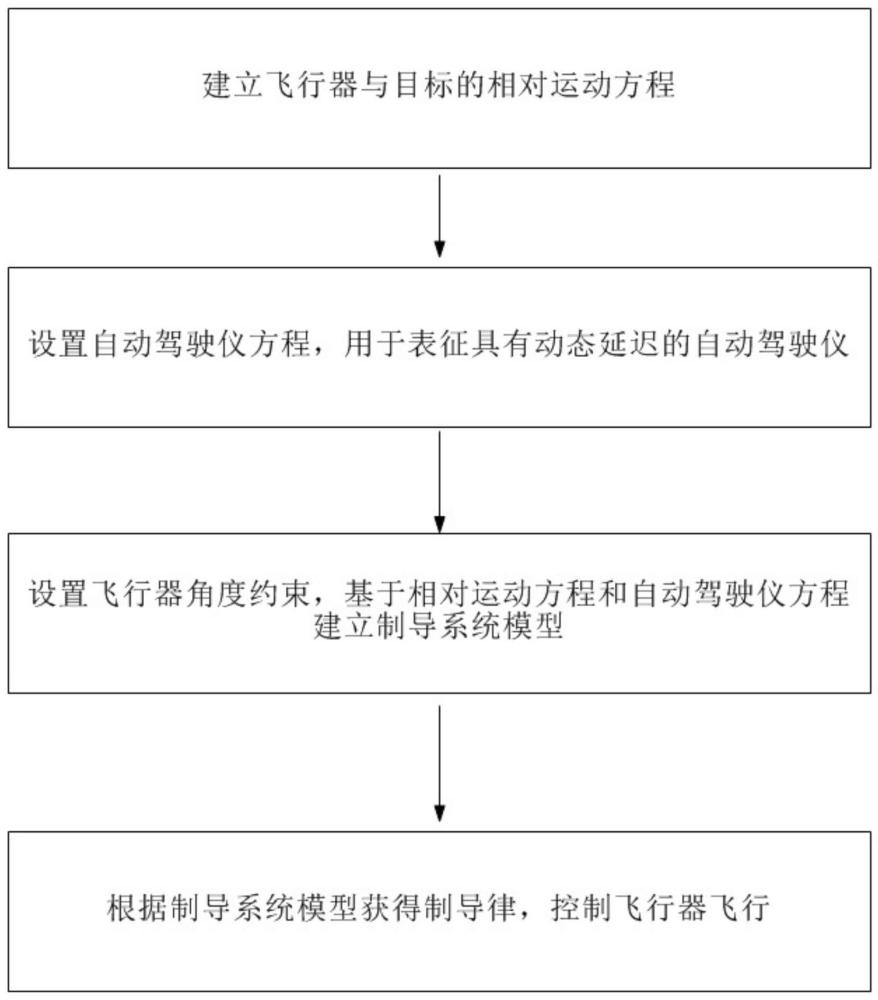
2、s1、建立飞行器与目标的相对运动方程;
3、s2、设置自动驾驶仪方程,用于表征具有动态延迟的自动驾驶仪;
4、s3、设置飞行器角度约束,基于相对运动方程和自动驾驶仪方程建立制导系统模型:
5、s4、根据制导系统模型获得制导律,控制飞行器飞行。
6、在一个优选的实施方式中,s1中,所述相对运动方程表示为:
7、
8、其中,r为飞行器与目标之间的相对距离,q为弹目视线倾角,θ为弹目视线偏角,amr为飞行器的加速度r方向上的分量;
9、amr为飞行器的加速度在r方向上的分量;
10、amq为飞行器的加速度在q方向上的分量;
11、amθ为飞行器的加速度在θ方向上的分量;
12、atr为目标的加速度在r方向上的分量;
13、atq为目标的加速度在q方向上的分量;
14、atθ为目标的加速度在θ方向上的分量。
15、在一个优选的实施方式中,所述自动驾驶仪方程表示为:
16、
17、其中,ξ为阻尼比,ωn为自动驾驶仪的自振频率,uq为q方向上的制导指令,uθ为θ方向上的制导指令。
18、在一个优选的实施方式中,所述飞行器角度约束表示为:
19、q(tf)=qd
20、θ(tf)=θd
21、其中,tf为制导终端时刻,qd为期望终端视线倾角,θd为期望终端视线偏角,q(tf)为制导终端时刻飞行器视线倾角,θ(tf)为制导终端时刻飞行器视线偏角。
22、在一个优选的实施方式中,所述制导系统模型表示为:
23、
24、a=-2ξωn,b2=ωn2;
25、其中,x1、x2、x3、x4为系统状态,设置为x1=[q-qd,θ-θd]t,x3=[amq,amθ]t,u=[uq,uθ]t。
26、在一个优选的实施方式中,s4中,包括以下子步骤:
27、s41、设置快速终端滑模面,使得系统状态x1和x2固定时间收敛至期望值;
28、s42、基于快速终端滑模面,获取系统状态x3的虚拟控制律x3d;
29、s43、基于快速终端滑模面,获取系统状态x4的虚拟控制律x4d;
30、s44、根据获取的虚拟控制率获得实际制导律。
31、在一个优选的实施方式中,s41中,所述快速终端滑模面s1设置为:
32、
33、其中,α1>0,β1>0,m1、n1、p1和q1均为正奇数,且有m1>n1,p1<q1。
34、在一个优选的实施方式中,s42中,设置虚拟控制量x3c:
35、
36、其中,α2、β2为常数参数,h为饱和函数限制的最大值,m2、n2、p2和q2均为正奇数,为饱和函数,表示为:
37、
38、通过设置一阶低通滤波器对虚拟控制量x3c处理,获得系统状态x3的虚拟控制律x3d。
39、在一个优选的实施方式中,s43中,设置虚拟控制量x4c:
40、
41、其中,α3、β3为常数参数,m3、n3、p3和q3均为正奇数。
42、通过设置非线性滤波器对虚拟控制量x4c处理,获得系统状态x4的虚拟控制律x4d。
43、在一个优选的实施方式中,s44中,所述实际制导律为:
44、
45、本发明所具有的有益效果包括:
46、(1)提高了飞行器在攻击空中机动目标时的制导精度;
47、(2)能够在较短时间内控制飞行器拦截空中机动目标。
技术特征:
1.一种考虑自动驾驶仪动态特性的飞行器角度约束制导方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的考虑自动驾驶仪动态特性的飞行器角度约束制导方法,其特征在于,
3.根据权利要求1所述的考虑自动驾驶仪动态特性的飞行器角度约束制导方法,其特征在于,
4.根据权利要求1所述的考虑自动驾驶仪动态特性的飞行器角度约束制导方法,其特征在于,
5.根据权利要求1所述的考虑自动驾驶仪动态特性的飞行器角度约束制导方法,其特征在于,
6.根据权利要求1所述的考虑自动驾驶仪动态特性的飞行器角度约束制导方法,其特征在于,
7.根据权利要求1所述的考虑自动驾驶仪动态特性的飞行器角度约束制导方法,其特征在于,
8.根据权利要求1所述的考虑自动驾驶仪动态特性的飞行器角度约束制导方法,其特征在于,
9.根据权利要求1所述的考虑自动驾驶仪动态特性的飞行器角度约束制导方法,其特征在于,
10.根据权利要求1所述的考虑自动驾驶仪动态特性的飞行器角度约束制导方法,其特征在于,
技术总结
本发明公开了一种考虑自动驾驶仪动态特性的飞行器角度约束制导方法,包括以下步骤:建立飞行器与目标的相对运动方程;设置自动驾驶仪方程,用于表征具有动态延迟的自动驾驶仪;设置飞行器角度约束,基于相对运动方程和自动驾驶仪方程建立制导系统模型:根据制导系统模型获得制导律。本发明公开的考虑自动驾驶仪动态特性的飞行器角度约束制导方法,能够在较短时间内控制飞行器拦截空中机动目标,提高了飞行器在攻击空中机动目标时的制导精度。
技术研发人员:王伟,李成洋,王雨辰,李俊辉,刘佳琪,陈仕伟,朱泽军,杨婧,张宏岩,于之晨
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!