无人机集群协同探测多目标的路径规划方法及系统与流程
本发明属于无人机的,特别是涉及无人机集群协同探测多目标的路径规划方法及系统。
背景技术:
1、随着无人机蜂群技术的发展,无人机协同搜索无论在军事领域还是在民用领域都有着重要的作用。其中,无人机对于多目标的协同搜索更是其中的热门问题。传统的路径规划方法是将整个场景建模成为多旅行商问题,利用常规的分组遗传算法来求解。但当目标点的规模由数十个增长到数百个后,常规的分组遗传算法将会出现计算效率低,全局收敛性差的问题。
技术实现思路
1、本发明为解决上述背景技术中存在的技术问题,提供了无人机集群协同探测多目标的路径规划方法及系统。
2、本发明采用以下技术方案:无人机集群协同探测多目标的路径规划方法,包括以下步骤:
3、针对无人机集群协同探测多目标点进行数学建模:定义无人机集群的出发点为坐标原点o,由m架无人机组成的无人机集群表示为u={u1,u2,…,um},由n个目标点组成的任务集合为t={t1,t2,…,tn};当集群完成探测后,再重新返回至坐标原点o;
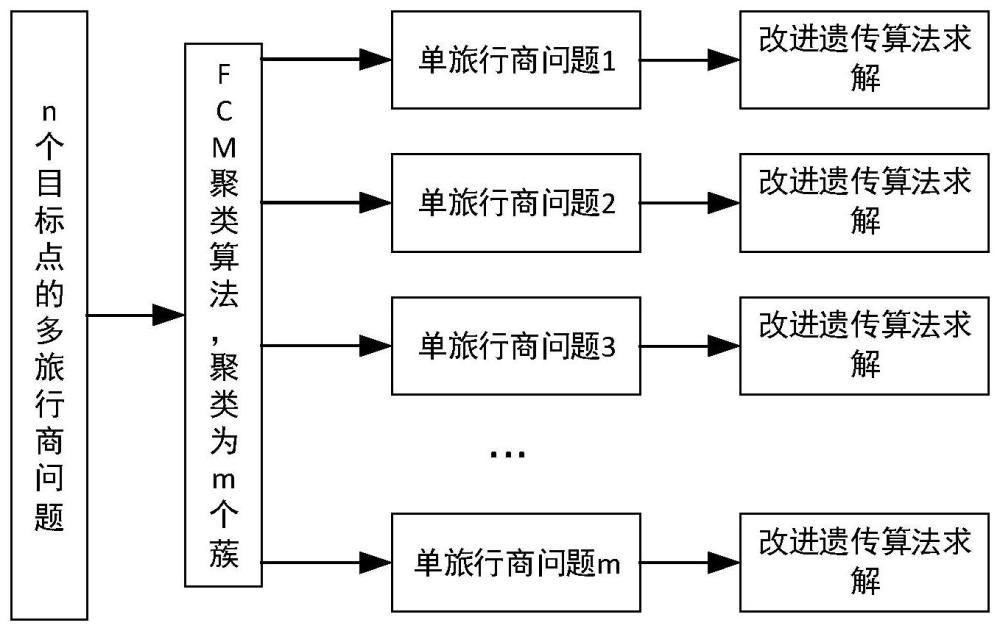
4、将整个无人机集群的任务转换成多旅行商的问题,将n个目标点聚类成为n个集群,将多旅行商问题转换成n个单旅行商问题,其中,n<n;
5、对每个单旅行商问题进行求解:在任务集合t中生成初始种群,引入遗传参数自适应调节策略,采用适应度函数计算得到初始种群中每个个体的适应度值;引入精英个体保留策略,迭代出适应度值最高的个体,直至最高的适应度值满足条件,得到满意路径:最高的适应度值对应个体的路径。
6、在进一步的实施例中,将整个无人机集群的任务转换成多旅行商的问题的转化步骤如下:
7、无人机ui对ki个目标点依次进行探测,获取路径信息点得到路径信息点集合ri={o,ti1,ti2,…,tin,o};其中,ui∈[u1,um],tin表示无人机ui探测的第ki个路径信息点,n∈[1,ki],
8、采用公式(1)计算探测路径的总长度li:
9、
10、其中,tj表示xxx;
11、记最后一架无人机飞回坐标原点o的时间为任务完成时间tmax,假设无人机飞行速度为恒定,则采用公式(2)求得最小探测路径长度:
12、
13、式中,lmax为无人机ui探测过程中的最长长度。
14、在进一步的实施例中,将多旅行商问题转换成多个单旅行商问题的转化步骤如下:
15、步骤101、在n个目标点中选取n个目标点作为聚类中心,并表示为:{c1,c2,…,cn}∈t;
16、步骤102、采用公式(3)计算其他目标点与每个聚类中心之间的距离d,并将其划分到对应的簇中:
17、其中,k=1,2,…,n;表示xxxx;
18、步骤103、根据每个聚类中心重新生成信息,表达如公式(4)所示:
19、
20、式中,xj、yj、ni、nj分别为xxxxx;
21、步骤104、重复步骤102和步骤103进行迭代,直至中心点的位置固定。
22、在进一步的实施例中,所述初始种群的生成流程如下:
23、步骤201、在任务集合t中随机选择一个目标点作为当前目标tcurrent,并加入个体中;
24、步骤202、以当前目标tcurrent为参照,在任务集合t中找出与之最近的目标点作为下个目标tnext,并将所述下个目标tnext更新为当前目标tcurrent;
25、步骤203、重复步骤202,直至所有的目标点都加入个体,得到初步优化的初始群种。
26、在进一步的实施例中,所述适应函数的公式为:itness(i)=d/f(ri)。
27、在进一步的实施例中,所述遗传参数自适应调节策略包括:自适应交叉概率pci调节策略和自适应变异pm调节策略;
28、自适应交叉概率pci的调节策略如下:
29、
30、式中,pci为个体的发生交叉的概率,hi为个体的自适应度,hmax为最大适应度,为当前群种的平均适应度;pcmax为最大的交叉概率,pcmin为最小的交叉概率,g为设置的最大迭代次数,g为当前的迭代次数;
31、其中,
32、pcmin=0.5。
33、在进一步的实施例中,所述自适应变异pm的调节策略包括:
34、
35、式中,pmi为个体的发生变异的概率,hmax为最大适应度,为当前群种的平均适应度;pmmin为最小的变异概率,pmmax为最大的变异概率,g为设置的最大迭代次数,g为当前的迭代次数;
36、其中,
37、pmmax=0.005。
38、在进一步的实施例中,所述精英个体保留策略如下:将适应函数值最高的个体直接复制纳入交叉配对的父代群体中,当所有父代个体执行完交叉算子后,再沿用精英个体保留机制,用交叉前的精英个体替换交叉后的适应度最差的个体,剔除质量低的个体以保证个体的延续;
39、每次变异操作都是对最优个体进行,并且采用有选择的变异方式,如果变异后的新个体的适应度低于初始适应度,则放弃新个体,保留原有的最优个体。
40、无人机集群协同探测多目标的路径规划系统,用于实上所述的路径规划方法,包括:
41、第一模块,被设置为针对无人机集群协同探测多目标点进行数学建模:定义无人机集群的出发点为坐标原点o,由m架无人机组成的无人机集群表示为u={u1,u2,…,um},由n个目标点组成的任务集合为t={t1,t2,…,tn};当集群完成探测后,再重新返回至坐标原点o;
42、第二模块,被设置为将整个无人机集群的任务转换成多旅行商的问题,将n个目标点聚类成为n个集群,将多旅行商问题转换成n个单旅行商问题,其中,n<n;
43、第三模块,被设置为对每个单旅行商问题进行求解:在任务集合t中生成初始种群,引入遗传参数自适应调节策略,采用适应度函数计算得到初始种群中每个个体的适应度值;引入精英个体保留策略,迭代出适应度值最高的个体,直至最高的适应度值满足条件,得到满意路径:最高的适应度值对应个体的路径。
44、本发明的有益效果:本发明提出了一种基于二阶段的无人机集群协同探测多目标的路径规划方法。首先将整个场景建模成为多旅行商为题,后对整个问题进行求解。第一阶段首先利用k均值聚类算法将目标点进行聚类,将多旅行商问题转换成多个单旅行商问题,第二阶段利用改进的遗传算法对单旅行商问题进行求解。相比于传统遗传算法,本方法首先利用贪婪算法生成初始种群,其次设置了遗传参数自适应调节策略,避免遗传进化代数与个体适应陷入局部最优解,同时提高了寻优的速度;并且为保证优秀基因结构的保留,设置了精英个体保留的策略。经试验证明,二阶段的路径规划方法对于传统的分组遗传算法全局收敛效果更好且收敛速度更快。
技术特征:
1.无人机集群协同探测多目标的路径规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的无人机集群协同探测多目标的路径规划方法,其特征在于,将整个无人机集群的任务转换成多旅行商的问题的转化步骤如下:
3.根据权利要求1所述的无人机集群协同探测多目标的路径规划方法,其特征在于,将多旅行商问题转换成多个单旅行商问题的转化步骤如下:
4.根据权利要求1所述的无人机集群协同探测多目标的路径规划方法,其特征在于,所述初始种群的生成流程如下:
5.根据权利要求1所述的无人机集群协同探测多目标的路径规划方法,其特征在于,所述遗传参数自适应调节策略包括:自适应交叉概率pci调节策略和自适应变异pm调节策略;
6.根据权利要求1所述的无人机集群协同探测多目标的路径规划方法,其特征在于,所述自适应变异pm的调节策略包括:
7.根据权利要求1所述的无人机集群协同探测多目标的路径规划方法,其特征在于,所述精英个体保留策略如下:将适应函数值最高的个体直接复制纳入交叉配对的父代群体中,当所有父代个体执行完交叉算子后,再沿用精英个体保留机制,用交叉前的精英个体替换交叉后的适应度最差的个体,剔除质量低的个体以保证个体的延续;
8.无人机集群协同探测多目标的路径规划系统,用于实现权利要求1至7中任意一项所述的路径规划方法,其特征在于,包括:
技术总结
本发明提出了无人机集群协同探测多目标的路径规划方法及系统,属于无人机的技术领域。首先将整个场景建模成为多旅行商为题,后对整个问题进行求解。第一阶段首先利用K均值聚类算法将目标点进行聚类,将多旅行商问题转换成多个单旅行商问题,第二阶段利用改进的遗传算法对单旅行商问题进行求解。相比于传统遗传算法,本方法首先利用贪婪算法生成初始种群,其次设置了遗传参数自适应调节策略,避免遗传进化代数与个体适应陷入局部最优解,同时提高了寻优的速度;并且为保证优秀基因结构的保留,设置了精英个体保留的策略。经试验证明,二阶段的路径规划方法对于传统的分组遗传算法全局收敛效果更好且收敛速度更快。
技术研发人员:宋钰涛,吕海洋,成超,张益民,李贞新
受保护的技术使用者:南京瀚海伏羲防务科技有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!