多车跟行调度方法、装置和存储介质与流程
本发明涉及晶圆运输控制领域,具体涉及一种多车跟行调度方法、装置和存储介质。
背景技术:
1、在oht小车(空中走行式搬送车)的生产运行环境中,会非常频繁地出现多车在一个区域路段中同时工作的场景,这样就会遇到车辆行驶过程中运动干涉,无法确切保持车辆安全距离的问题,从而导致车辆相撞,引发安全问题。以前车处于行走停止中、后车还未到达指定位置为例,如果直接让后车截停,则又会减缓整个自动物料搬送系统(amhsautomatic material handling system)的效率,不利于工厂生产。
技术实现思路
1、因此,为了克服上述现有技术的缺点,本发明提供一种在保证安全的前提下,合理地对多车跟车行走进行调度控制,从而能够极大地提高amhs整体运行效率的多车跟行调度方法、装置和存储介质。
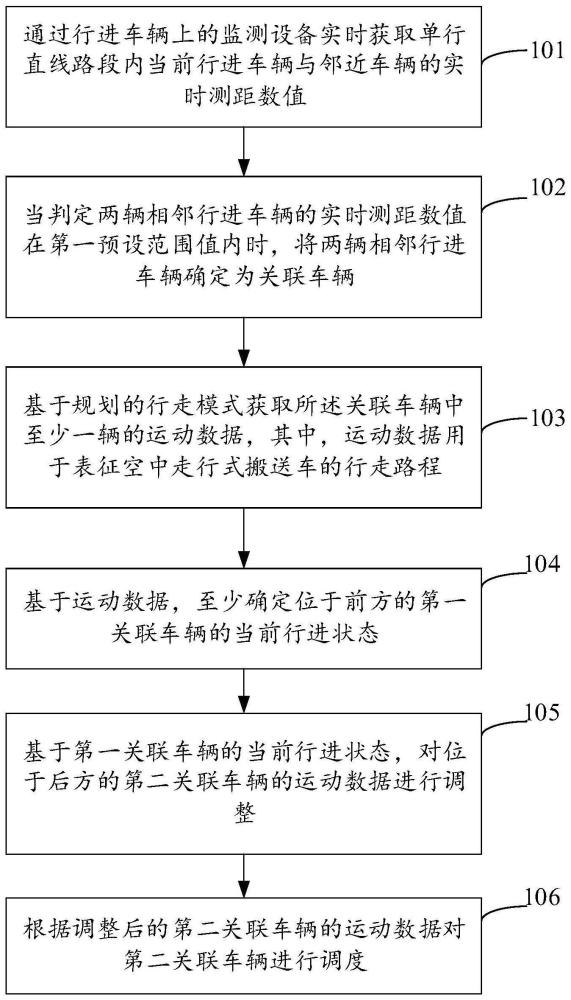
2、为了实现上述目的,本发明提供一种多车跟行调度方法,包括:通过行进车辆上的监测设备实时获取单行直线路段内当前行进车辆与邻近车辆的实时测距数值;当判定两辆相邻行进车辆的所述实时测距数值在第一预设范围值内时,将所述两辆相邻行进车辆确定为关联车辆;基于规划的行走模式获取所述关联车辆中至少一辆的运动数据,其中,所述运动数据用于表征所述空中走行式搬送车的行走路程;基于所述运动数据,确定位于前方的第一关联车辆的当前行进状态;基于所述第一关联车辆的当前行进状态,对位于后方的第二关联车辆的所述运动数据进行调整;根据调整后的所述第二关联车辆的所述运动数据对所述第二关联车辆进行调度。
3、在其中一个实施例中,所述当判定任意两辆相邻行进车辆的所述实时测距数值在第一预设范围值内时,确定所有的关联车辆,包括:筛选出所有的所述实时测距数值在第一预设范围值内的相邻行进车辆;判断被筛选出的相邻行进车辆之间是否存在重复;当判定存在重复时,与该重复相关的所有相邻行进车辆均被设定为关联车辆。
4、在其中一个实施例中,所述基于规划的行走模式获取所述关联车辆中至少一辆的运动数据,包括:当所述行走模式为前馈模式时,获取所述第一关联车辆在所述单行直线路段中的与各个加速阶段、匀速阶段以及减速阶段中的所有阶段相对应的运动数据,所述运动数据通过所述空中走行式搬送车的预计行走速度和预计行走时长表征行走路程;或当所述行走模式为后馈模式时,实时获取所述第二关联车辆在所述单行直线路段的运动数据,所述运动数据通过行程值表征行走路程。
5、在其中一个实施例中,当所述行走模式为前馈模式时,基于所述运动数据,确定所述第一关联车辆的当前行进状态以及预计行进状态;基于所述第一关联车辆的当前行进状态以及预计行进状态,对位于后方的第二关联车辆的所述运动数据进行调整。
6、在其中一个实施例中,所述基于所述第一关联车辆的当前行进状态,对位于后方的第二关联车辆的所述运动数据进行调整,包括:当位于前方的第一关联车辆的当前行进状态为减速阶段时,对位于后方的第二关联车辆的所述运动数据进行调整;或者当位于前方的第一关联车辆的当前行进状态为加速阶段或匀速阶段时,维持位于后方的第二关联车辆的当前行进状态。
7、在其中一个实施例中,所述当位于前方的第一关联车辆的当前行进状态为减速阶段时,对位于后方的第二关联车辆的所述运动数据进行调整,包括:判断所述第二关联车辆的当前行进状态是否与所述第一关联车辆的当前行进状态发生冲突;当判定冲突时,将所述第二关联车辆的当前行进状态调整为减速状态,并实时调整冲突情况下的所述第二关联车辆的所述运动数据;当所述第二关联车辆的行走速度不大于所述第一关联车辆的行走速度时,根据所述第一关联车辆的当前行进状态,实时调整所述第二关联车辆的当前行进状态。
8、在其中一个实施例中,还包括:当所述关联车辆通过雷达监测到路段前方存在未被关联上的行进车辆时,将该关联车辆的当前行进状态调整减速阶段;基于该调整后的当前行进状态,对位于后方的所述关联车辆的所述运动数据进行调整。
9、在其中一个实施例中,还包括:所述行进车辆还通过电机扫描器和用于定位的位置条码来确定所述行进车辆的相对位置;基于所述运动数据确定所述行进车辆的最后一个减速阶段,并在到达该减速阶段前控制所述行进车辆的速度降至低速行驶;控制所述行进车辆在最后一个减速阶段进行减速,并在到达临界位置时速度降至定位速度;控制所述行进车辆以定位速度匀速行走,直到所述电机扫描器读取到作为预警提示的位置条码,减速到停止行走。
10、在其中一个实施例中,还包括:接收所述行进车辆按照所述时间周期反馈的当前位置信息、当前行走速度以及当前行走时长;当判定所述行进车辆超出目的位置时,根据所述当前位置信息、所述当前行走速度以及所述当前行走时长,对所述运动数据进行校准,使得所述空中走行式搬送车逆行至所述目的位置。
11、一种多车跟行调度装置,所述装置包括:实时检测模块,用于实时获取单行直线路段内当前行进车辆与邻近车辆的实时测距数值;关联设定模块,用于当判定两辆相邻行进车辆的所述实时测距数值在第一预设范围值内时,将所述两辆相邻行进车辆确定为关联车辆;参数获取模块,用于基于规划的行走模式获取所述关联车辆中至少一辆的运动数据,其中,所述运动数据用于表征所述空中走行式搬送车的行走路程;状态确定模块,用于基于所述运动数据,至少确定位于前方的第一关联车辆的当前行进状态;调整模块,用于基于所述第一关联车辆的当前行进状态,对位于后方的第二关联车辆的所述运动数据进行调整;调度模块,用于根据调整后的所述第二关联车辆的所述运动数据对所述第二关联车辆进行调度。
12、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述方法的步骤。
13、与现有技术相比,本发明的优点在于:以行进车辆与邻近车辆的实时测距数值作为条件,对关联车辆采取相应的行走控制策略。在保证安全的前提下,合理地对多车跟车行走进行调度控制,从而能够极大地提高amhs整体运行效率。
技术特征:
1.一种多车跟行调度方法,其特征在于,包括:
2.根据权利要求1所述的多车跟行调度方法,其特征在于,所述当判定两辆相邻行进车辆的所述实时测距数值在第一预设范围值内时,将所述两辆相邻行进车辆确定为关联车辆,包括:
3.根据权利要求1所述的多车跟行调度方法,其特征在于,所述基于规划的行走模式获取所述关联车辆中至少一辆的运动数据,包括:
4.根据权利要求3所述的多车跟行调度方法,其特征在于,当所述行走模式为前馈模式时,基于所述运动数据,确定所述第一关联车辆的当前行进状态以及预计行进状态;
5.根据权利要求1所述的多车跟行调度方法,其特征在于,所述基于所述第一关联车辆的当前行进状态,对位于后方的第二关联车辆的所述运动数据进行调整,包括:
6.根据权利要求5所述的多车跟行调度方法,其特征在于,所述当位于前方的第一关联车辆的当前行进状态为减速阶段时,对位于后方的第二关联车辆的所述运动数据进行调整,包括:
7.根据权利要求6所述的多车跟行调度方法,其特征在于,所述冲突是指当第一关联车辆的状态为减速状态时,第二关联车辆的状态为加速状态或匀速状态。
8.根据权利要求1所述的多车跟行调度方法,其特征在于,还包括:
9.根据权利要求1所述的多车跟行调度方法,其特征在于,还包括:
10.根据权利要求1所述的多车跟行调度方法,其特征在于,还包括:
11.一种多车跟行调度装置,其特征在于,所述装置包括:
12.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至10中任一项所述的方法的步骤。
技术总结
本发明提供了一种多车跟行调度方法、装置和存储介质,属于晶圆运输控制领域,具体包括通过行进车辆上的监测设备实时获取单行直线路段内当前行进车辆与邻近车辆的实时测距数值;将所述两辆相邻行进车辆确定为关联车辆;基于规划的行走模式获取关联车辆中至少一辆对应的运动数据;基于运动数据,至少确定位于前方的第一关联车辆的当前行进状态;基于第一关联车辆的当前行进状态,对位于后方的第二关联车辆的运动数据进行调整;根据调整后的第二关联车辆的运动数据对第二关联车辆进行调度。通过本申请的处理方案,在保证安全的前提下,合理地对多车跟车行走进行调度控制,从而能够极大地提高AMHS整体运行效率。
技术研发人员:张奕人,缪峰
受保护的技术使用者:弥费科技(上海)股份有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!