一种双巷掘锚工作面地面数字孪生驾驶舱控制方法及系统与流程
本发明涉及煤矿掘进装备控制,特别是指一种双巷掘锚工作面地面数字孪生驾驶舱控制方法及系统。
背景技术:
1、掘进工作是煤矿开采的首要环节,面临着复杂的工作环境和装备工艺,实现掘进工作面的智能化控制是煤矿智能化建设的必要环节,当前,我国已建成上百个智能化掘进工作面,其中,包含了多种配套形式的快速掘进成套装备,常见的有掘锚一体机为龙头的快速掘进成套装备等,掘进工作面设备的远程控制是掘进工作面智能化控制的基本需求,远程控制包括井下远离工作面的远程控制和地面远程控制两部分内容,随着数字孪生技术的发展,将数字孪生技术应用在远程集控中心已经成为提高智能化控制水平的一种重要方式。
2、掘进工作面存在多种作业工艺,常见的有掘进机为龙头的单巷掘进、掘锚一体机为龙头的单巷掘进、连续采煤机为龙头的双巷掘进。以掘锚一体机为掘进龙头装备,梭车为运输装备,四臂锚杆机为支护装备,履带式转载破碎机为转运破碎装备的双巷掘进工艺是近年来随着掘锚一体机普遍使用产生的一种较新的掘进工艺,该种工艺原理与连续采煤机掘进工作面类似,不同之处在于龙头装备替换为掘锚一体机,实现了掘锚平行作业,提高了作业效率。
3、其中,传统的双巷掘锚工作面地面控制方法存在以下几个缺陷:
4、数据获取困难,传统方法需要手动采集和记录地面相关数据,这需要耗费大量的时间和人力资源。而且,由于数据采集的不及时和不准确,可能导致数字孪生模型的建立和控制策略的制定存在误差。
5、人工干预的依赖性,传统方法中的控制过程往往需要人工干预和操作,这增加了工作的复杂性和风险。而且,人工操作容易受到主观因素的影响,可能导致控制结果的不稳定性和不一致性。
技术实现思路
1、本发明要解决的技术问题是提供一种双巷掘锚工作面地面数字孪生驾驶舱控制方法及系统,可以更准确地模拟和预测双巷掘锚工作面的行为和性能,使得控制策略可以更精确地针对实际情况进行制定,从而提高控制精度。
2、为解决上述技术问题,本发明的技术方案如下:
3、第一方面,一种双巷掘锚工作面地面数字孪生驾驶舱控制方法,包括:
4、获取双巷掘锚工作面的相关数据;
5、根据所述相关数据,建立数字孪生模型;
6、对建立的数字孪生模型进行验证,以得到验证结果;
7、根据所述验证结果,对数字孪生模型进行优化,以得到优化的数字孪生模型;
8、根据优化的数字孪生模型,生成控制策略;
9、根据所述控制策略,控制双巷掘锚工作面地面驾驶舱。
10、进一步的,获取双巷掘锚工作面的相关数据,包括:
11、通过测距传感器、温度传感器以及压力传感器,对双巷掘锚工作面进行实时监测和数据采集,以获取工作面的各种物理参数和环境信息;
12、通过摄像头,对双巷掘锚工作面进行图像或视频采集,以获得实时的岩层结构、地质变化以及工作面进展。
13、进一步的,根据所述相关数据,建立数字孪生模型,包括:
14、对获取的工作面的各种物理参数、环境信息、岩层结构、地质变化以及工作面进展进行预处理,以得到预处理数据;
15、从所述预处理数据中提取特征数据;
16、根据预处理数据和特征数据,建立数字孪生模型。
17、进一步的,对建立的数字孪生模型进行验证,以得到验证结果,包括:
18、获取验证数据集;
19、将验证数据集输入到预设的数字孪生模型中;
20、根据所述验证数据,通过数字孪生模型进行预测,以生成相应的预测结果;
21、将所述预测结果与验证数据集中的真实标签或期望输出进行比较,以得到比较结果;
22、根据所述比较结果,计算一些评估指标来衡量模型的性能。
23、进一步的,根据所述验证结果,对数字孪生模型进行优化,以得到优化的数字孪生模型,包括:
24、分析所述验证结果,以得到分析结果;
25、根据所述分析结果,确定优化数字孪生模型的具体目标;
26、根据分析结果和具体目标,调整数字孪生模型的参数,以得到优化的数字孪生模型。
27、进一步的,根据优化的数字孪生模型,生成控制策略,包括:
28、使用优化后的数字孪生模型,输入实时的数据或场景信息,进行预测,以生成相应的输出结果;
29、根据模型的预测结果,生成相应的控制策略;
30、根据实际应用需求和场景,对生成的控制策略进行优化,以得到最终的控制策略。
31、进一步的,根据所述控制策略,控制双巷掘锚工作面地面驾驶舱,包括:
32、根据生成的控制策略,将相应的指令或操作应用到双巷掘锚工作面地面驾驶舱中;
33、在控制过程中,持续监控双巷掘锚工作面的实时数据;
34、根据实时数据的反馈,对控制策略进行调整和优化。
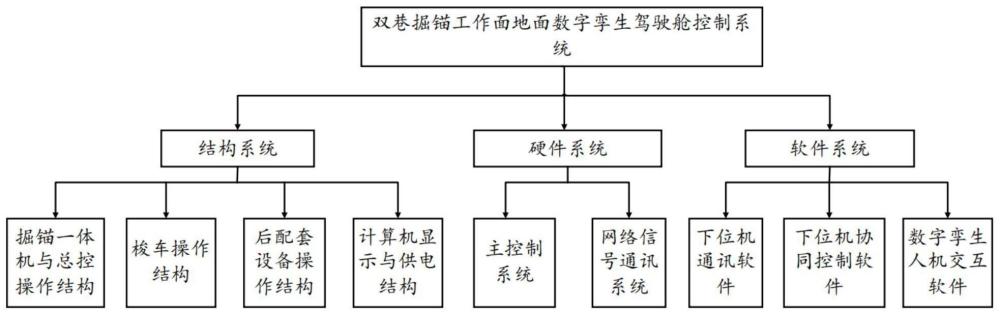
35、第二方面,一种双巷掘锚工作面地面数字孪生驾驶舱控制系统,包括:
36、获取模块,用于获取双巷掘锚工作面的相关数据;根据所述相关数据,建立数字孪生模型;对建立的数字孪生模型进行验证,以得到验证结果;
37、处理模块,用于根据所述验证结果,对数字孪生模型进行优化,以得到优化的数字孪生模型;根据优化的数字孪生模型,生成控制策略;根据所述控制策略,控制双巷掘锚工作面地面驾驶舱。
38、本发明的上述方案至少包括以下有益效果:
39、本发明的上述方案,通过建立数字孪生模型并验证优化,该方法可以更准确地模拟和预测双巷掘锚工作面的行为和性能,使得控制策略可以更精确地针对实际情况进行制定,从而提高控制精度。由于数字孪生模型可以与实际系统进行实时对接,该方法具有较高的实时性和灵活性,控制策略可以根据实时数据和模型预测结果进行动态调整和优化,以适应不同的工作面状态和变化。通过数字孪生模型的应用,可以对双巷掘锚工作面进行自动化控制,减少了人工干预和操作的需求,提高了工作效率,同时,优化的控制策略可以更有效地指导和管理工作面的运行,进一步提高工作效率。通过数字孪生模型的预测和优化,可以提前发现和解决潜在的问题和风险,减少事故和故障的发生。这降低了工作面的运营风险,并减少了维修和维护成本。数字孪生模型可以模拟和预测双巷掘锚工作面的行为和性能,从而帮助识别和评估潜在的安全隐患,通过优化的控制策略,可以减少人为错误和操作失误,提升工作面的安全性。
技术特征:
1.一种双巷掘锚工作面地面数字孪生驾驶舱控制方法,其特征在于,包括:
2.根据权利要求1所述的双巷掘锚工作面地面数字孪生驾驶舱控制方法,其特征在于,获取双巷掘锚工作面的相关数据,包括:
3.根据权利要求2所述的双巷掘锚工作面地面数字孪生驾驶舱控制方法,其特征在于,根据所述相关数据,建立数字孪生模型,包括:
4.根据权利要求3所述的双巷掘锚工作面地面数字孪生驾驶舱控制方法,其特征在于,对建立的数字孪生模型进行验证,以得到验证结果,包括:
5.根据权利要求4所述的双巷掘锚工作面地面数字孪生驾驶舱控制方法,其特征在于,根据所述验证结果,对数字孪生模型进行优化,以得到优化的数字孪生模型,包括:
6.根据权利要求5所述的双巷掘锚工作面地面数字孪生驾驶舱控制方法,其特征在于,根据优化的数字孪生模型,生成控制策略,包括:
7.根据权利要求6所述的双巷掘锚工作面地面数字孪生驾驶舱控制方法,其特征在于,根据所述控制策略,控制双巷掘锚工作面地面驾驶舱,包括:
8.一种双巷掘锚工作面地面数字孪生驾驶舱控制系统,其特征在于,包括:
9.一种计算设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有程序,该程序被处理器执行时实现如权利要求1-7中任一项所述的方法。
技术总结
本发明提供一种双巷掘锚工作面地面数字孪生驾驶舱控制方法及系统,涉及煤矿掘进装备控制技术领域,所述方法包括:获取双巷掘锚工作面的相关数据;根据所述相关数据,建立数字孪生模型;对建立的数字孪生模型进行验证,以得到验证结果;根据所述验证结果,对数字孪生模型进行优化,以得到优化的数字孪生模型;根据优化的数字孪生模型,生成控制策略;根据所述控制策略,控制双巷掘锚工作面地面驾驶舱。本发明可以更准确地模拟和预测双巷掘锚工作面的行为和性能,使得控制策略可以更精确地针对实际情况进行制定,从而提高控制精度。
技术研发人员:原钢,呼守信,金江,高鹏,高旭彬,杨勇,郝亚明,金雪琪,上官志鹏,赵海伟,张凯,晓亚迪,李杰,王婵娟,冯利
受保护的技术使用者:山西天地煤机装备有限公司
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!