机器人的清扫路线规划方法、系统、设备及存储介质与流程
本申请涉及机器人,特别是机器人的清扫路线规划方法、系统、设备及存储介质。
背景技术:
1、随着新能源技术的迅猛发展,太阳能光伏发电被广泛应用,但光伏面板进行发电时,由于所处环境复杂多样,光伏面板表面容易被灰尘、杂物等遮挡,严重影响光伏组件的发电效率和寿命。因此,需要经常对光伏面板表面进行清洁、检测等运维活动。
2、目前主要采用的运维方式为人工手持清洁工具运维,这种方式效率低、危险性大。
技术实现思路
1、本申请提供了一种机器人的清扫路线规划方法、系统、设备及存储介质,应用于光伏面板,可以实现针对光伏面板的机器人清扫路线规划,实用性较强且可以节省机器人清扫时间。
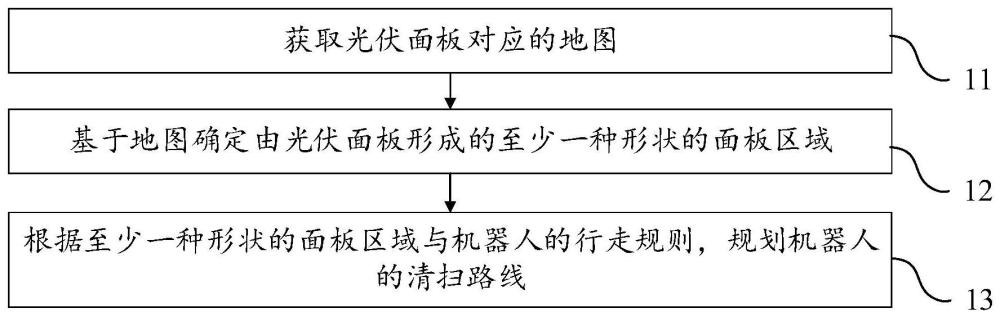
2、为了解决上述技术问题,本申请采用的一个技术方案是:提供一种机器人的清扫路线规划方法,包括:获取光伏面板对应的地图;基于地图确定由光伏面板形成的至少一种形状的面板区域;根据至少一种形状的面板区域与机器人的行走规则,规划机器人的清扫路线。
3、其中,至少一种形状的面板区域包括第一形状面板区域,其中第一形状面板区域为矩形面板区域;根据至少一种形状的面板区域与机器人的行走规则,规划机器人的清扫路线,包括:根据机器人的行走规则,从第一形状面板区域确定区域边距;根据区域边距和第一形状面板区域的尺寸,规划机器人的清扫路线。
4、其中,根据区域边距和第一形状面板区域的尺寸,规划机器人的清扫路线,包括:利用边距在第一形状面板区域上确定清扫起始位;利用机器人的实际清扫面积、清扫起始位和第一形状面板区域的尺寸,规划机器人的清扫路线。
5、其中,利用机器人的实际清扫面积、清扫起始位和第一形状面板区域的尺寸,规划机器人的清扫路线,包括:利用机器人的实际清扫面积、清扫起始位和第一形状面板区域的尺寸,确定机器人的至少两条清扫子路线;每一清扫子路线包括若干导航点;在目标清扫子路线和下一清扫子路线之间,利用若干导航点中的部分导航点确定机器人的转换路线,转换路线用于引导机器人由目标清扫子路线移动至下一清扫子路线;基于至少两条清扫子路线和转换路线形成机器人的清扫路线。
6、其中,至少一种形状的面板区域包括第二形状面板区域,其中第二形状面板区域由多个矩形面板区域构成;根据至少一种形状的面板区域与机器人的行走规则,规划机器人的清扫路线,包括:将第二形状面板区域划分为多个矩形面板区域;根据机器人的行走规则,从每一矩形面板区域确定区域边距;根据区域边距和每一矩形面板区域的尺寸,规划机器人的清扫路线。
7、其中,至少一种形状的面板区域包括第一形状面板区域和第三形状面板区域,其中,第三形状面板区域用于连接在两个第一形状面板区域之间,第三形状面板区域小于第一形状面板区域;根据至少一种形状的面板区域与机器人的行走规则,规划机器人的清扫路线,包括:根据机器人的行走规则、以及第一形状面板区域和第三形状面板区域的位置关系,规划机器人在第一形状面板区域的第一清扫路线,以及机器人在第三形状面板区域的第二清扫路线。
8、其中,至少一种形状的面板区域包括第一形状面板区域、第二形状面板区域和第三形状面板区域,其中,第一形状面板区域为矩形面板区域,第二形状面板区域由多个矩形面板区域构成,第三形状面板区域用于连接在两个面板区域之间,第三形状面板区域小于第一形状面板区域;根据至少一种形状的面板区域与机器人的行走规则,规划机器人的清扫路线,包括:根据机器人的行走规则、以及第一形状面板区域、第二形状面板区域和第三形状面板区域的位置关系,规划机器人在第一形状面板区域的第一清扫路线,以及机器人在第三形状面板区域的第二清扫路线,以及机器人在第二形状面板区域的第三清扫路线。
9、为了解决上述技术问题,本申请采用的另一技术方案是:提供一种机器人的清扫路线规划系统,该清扫路线规划系统包括机器人和处理终端,处理终端用于向机器人发送清扫路线,以使机器人按照清扫路线对光伏面板进行清扫,其中,清扫路线是利用上述的机器人的清扫路线规划方法得到。
10、其中,该清扫路线规划系统还包括采集终端,该采集终端与处理终端通信连接,用于采集光伏面板对应的地图。
11、为了解决上述技术问题,本申请采用的另一技术方案是:提供一种电子设备,该电子设备包括存储器和处理器,存储器用于存储计算机程序,处理器用于执行计算机程序以实现上述的机器人的清扫路线规划方法。
12、为了解决上述技术问题,本申请采用的另一技术方案是:提供一种计算机可读储存介质,该计算机可读储存介质用于存储计算机程序,计算机程序在被处理器执行时用于实现上述的机器人的清扫路线规划方法。
13、本申请的有益效果是:区别于现有技术,本申请提供的机器人的清扫路线规划方法通过获取与光伏面板对应的地图,以基于地图确定由光伏面板形成的至少一种形状的面板区域,进而根据至少一种形状的面板区域与机器人的行走规则,规划机器人的清扫路线,可以根据不同形状的面板区域动态规划机器人的清扫路线,实用性较强且可以节省机器人清扫时间。
技术特征:
1.一种机器人的清扫路线规划方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述至少一种形状的面板区域包括第一形状面板区域;其中,所述第一形状面板区域为矩形面板区域;
3.根据权利要求2所述的方法,其特征在于,所述根据所述区域边距和所述第一形状面板区域的尺寸,规划所述机器人的清扫路线,包括:
4.根据权利要求3所述的方法,其特征在于,所述利用所述机器人的实际清扫面积、所述清扫起始位和所述第一形状面板区域的尺寸,规划所述机器人的清扫路线,包括:
5.根据权利要求1所述的方法,其特征在于,所述至少一种形状的面板区域包括第二形状面板区域;其中,所述第二形状面板区域由多个矩形面板区域构成;
6.根据权利要求1所述的方法,其特征在于,所述至少一种形状的面板区域包括第一形状面板区域和第三形状面板区域;其中,所述第三形状面板区域用于连接在两个第一形状面板区域之间;所述第三形状面板区域小于所述第一形状面板区域;
7.根据权利要求1所述的方法,其特征在于,所述至少一种形状的面板区域包括第一形状面板区域、第二形状面板区域和第三形状面板区域;其中,所述第一形状面板区域为矩形面板区域,所述第二形状面板区域由多个矩形面板区域构成,所述第三形状面板区域用于连接在两个面板区域之间;所述第三形状面板区域小于所述第一形状面板区域;
8.一种机器人的清扫路线规划系统,其特征在于,所述清扫路线规划系统包括:
9.根据权利要求8所述的清扫路线规划系统,其特征在于,所述清扫路线规划系统还包括:
10.一种电子设备,其特征在于,所述电子设备包括存储器和处理器,所述存储器用于存储计算机程序,所述处理器用于执行所述计算机程序以实现如权利要求1-7任一项所述的方法。
11.一种计算机可读储存介质,其特征在于,所述计算机可读储存介质用于存储计算机程序,所述计算机程序在被处理器执行时用于实现如权利要求1-7任一项所述的方法。
技术总结
本申请公开了一种机器人的清扫路线规划方法、系统、设备及存储介质,机器人的清扫路线规划方法包括:获取光伏面板对应的地图;基于地图确定由光伏面板形成的至少一种形状的面板区域;根据至少一种形状的面板区域与机器人的行走规则,规划机器人的清扫路线。通过上述方式,本申请提供的机器人的清扫路线规划方法可以基于机器人预设的行走规则和不同形状的面板区域,动态规划机器人的清扫路线,实现对光伏面板的清扫。
技术研发人员:莫玉乐,孙成满,王银,何向云
受保护的技术使用者:深圳创动科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!