一种无人集群协同控制系统及其运行方法与扩展方法与流程
本发明涉及无人机集群控制,具体涉及一种无人集群协同控制系统及其运行方法与扩展方法。
背景技术:
1、近年来,无人机、无人车、无人船等无人系统发展迅速,在军用、民用领域得到广泛应用并发挥重要作用。无人集群系统在执行协同搜索、协同探测、协同打击等复杂变化任务方面具有较大优势,但其控制难度会随着集群规模和任务复杂度的增加而剧增。
2、当前对无人集群系统的研究主要集中在集群协同算法及其地面仿真验证系统方面,已具备实现简单集群形态的设计和验证能力。在协同算法方面,cn116736883a提出了基于预测-决策策略的智能协同运动规划方法以解决无人飞行集群协同打击动态目标的问题,实现了集群智能协同运动规划方法的设计;cn115993780a公开了一种el型非线性集群系统时变编队优化跟踪控制方法及系统以解决不确定信息下非线性集群系统的编队控制的问题,实现了时变编队构型保持方法的设计。在地面仿真验证系统方面,cn113722912a发明了一种虚实融合的无人集群协同验证系统以解决复杂任务下无人集群协同算法半实物演示验证的问题,实现了可扩展系统架构、分布式数据交互机制及仿真系统模块化功能的设计;cn116500912a提供了一种分布式架构的无人机集群半实物仿真装置以解决由于集群仿真系统与集群实际架构不一致所导致的实时性和真实性无法保障的问题,实现了模拟集群协同功能的硬件层、仿真软件层和算法应用层的设计。
3、然而,上述发明在无人平台个体的协同控制系统设计方面未进行系统性设计,仅采用“数据接收→集群控制任务解算→控制执行”的串行循环模式,或者采用“多线程+中断+回调函数”的简单并行处理模式,因此对复杂协同任务的适应性和扩展性能力不足。为实现复杂协同任务,需要对协同探测、协同融合、协同规划、协同编队、协同组网、协同制导等多种协同算法的运行方式,协同算法之间、无人平台个体之间等信息交互方式进行合理设计。但由于不同协同算法的执行速度、运行频率、信息交互需求,以及算法运行的软件和硬件系统设计会随着任务需求的变化而调整,使得设计具有复杂协同功能的无人平台个体控制系统存在巨大挑战。鉴于此,本发明设计了一种无人集群协同控制系统及其运行方法与扩展方法,实现无人平台个体控制系统的协同功能,以便于无人集群复杂协同任务的快速实现和灵活扩展。
技术实现思路
1、本发明的目的在于克服现有无人平台个体控制系统难以满足无人集群复杂协同任务快速灵活扩展需求的不足,提供一种无人集群协同控制系统及其运行方法与扩展方法,用于提升无人集群协同功能设计便捷性。本发明的有益效果为:1)构建具有“探测感知功能模块-信息融合功能模块-决策规划功能模块-控制执行功能模块-任务管理功能模块-信息交互功能模块”基础功能模块的协同控制系统,为实现观察、判断、决策、执行、评估,以及信息交互等多种功能提供支撑,便于复杂协同功能的设计与扩展;2)基于黑板通信机制、进程间通信和udp通信技术,构建以信息交互功能模块为核心的协同信息交互协议与数据共享池,便于协同功能模块的分开设计、各自并行运行,以及在具有多核处理器的机载控制器上分布式部署;3)按执行速度、运行频率等差异和任务需求将不同协同控制功能模块设计为周期式、响应式、顺序式三种运行模式,实现不同算法程序的差异化运行,减少对有限计算资源的无效占用,提升协同控制系统响应能力。
2、为了达到上述目的,本发明采用的技术方案如下:
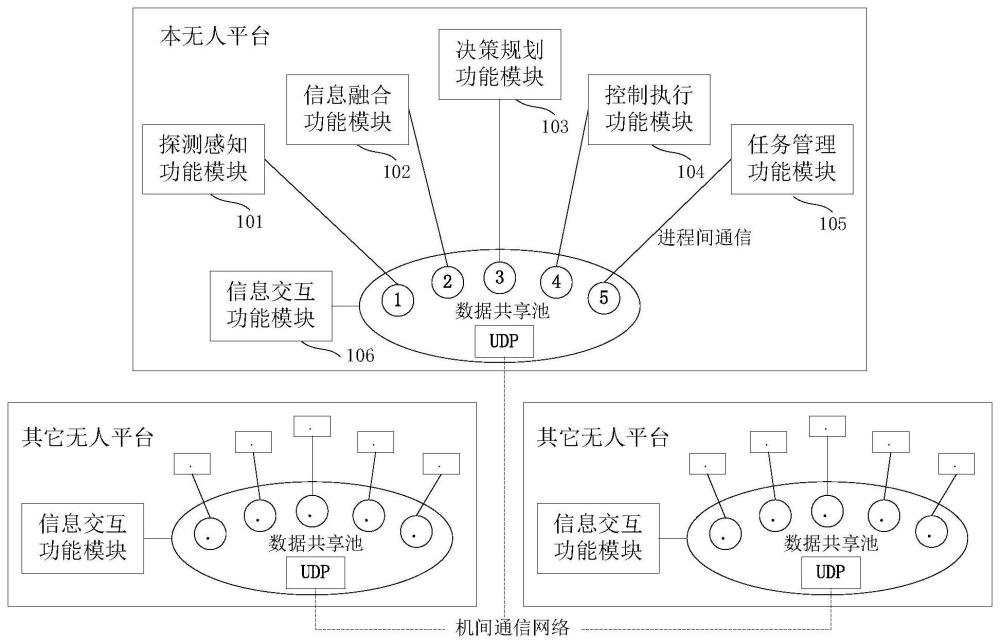
3、一种无人集群协同控制系统,其由多个功能模块组成,包括:探测感知功能模块、信息融合功能模块、决策规划功能模块、控制执行功能模块、任务管理功能模块、信息交互功能模块;所述无人集群协同控制系统的信息交互方式,包括功能模块之间,以及不同无人平台之间的信息交互,以信息交互功能模块为数据交互管理的核心,通过协同信息交互协议与数据共享池的方式来实现;不同功能模块分别采用不同进程或不同线程的方式设计,相互之间信息交互基于黑板通信机制;以信息交互功能模块为中心,基于进程间通信技术构建信息交互功能模块和其它功能模块之间的进程间通信渠道,基于udp通信技术和机间通信网络构建所述功能模块所在的无人平台与其它无人平台之间的udp通信渠道。
4、进一步,所述无人集群协同控制系统至少包括无人机、无人车、无人船等无人平台中的一种或多种无人平台的组合。所述探测感知功能模块,部署传感信息处理算法、目标识别算法等算法,进行所述功能模块所在的无人平台探测传感器数据的处理并输出环境状态信息、目标状态信息等探测信息;所述信息融合功能模块,部署多源信息融合算法、目标估计算法、意图判断算法等算法,进行多个无人平台数据融合计算并输出目标状态一致融合估计、目标运动轨迹预测、意图判定等融合信息;所述决策规划功能模块,部署目标分配算法、路径规划算法、博弈决策算法等算法,进行无人平台任务目标指定、运动路径设计、执行动作计算等决策与规划;所述控制执行功能模块,部署编队控制算法、制导控制算法等算法,进行无人平台具体运动的精确控制;所述任务管理功能模块,部署任务评估算法、任务流程管理算法等算法,进行集群任务状态的监控、评估等任务状态管理;所述信息交互功能模块,部署组网通信管理算法、信息收发处理算法等算法,进行协同控制功能模块之间、无人平台之间等多向数据传输管理。
5、本发明还提供了一种无人集群协同控制系统扩展方法,该方法为:
6、步骤1:根据任务需求在所述控制系统上新增加一个或多个功能模块,并分别为新增功能模块建立单独的进程或线程;
7、步骤2:将新增功能模块所需输入输出信息加入信息交互功能模块中的数据共享池,并基于进程间通信技术建立通信渠道;
8、步骤3:为新增功能模块指定周期式、响应式、顺序式中的一种运行模式,并设计运行触发方式;
9、步骤4:对所述控制系统中与新增功能模块有作用关系的功能模块进行适应性调整或修改。
技术特征:
1.一种无人集群协同控制系统,其特征在于,其由多个功能模块组成,包括:探测感知功能模块、信息融合功能模块、决策规划功能模块、控制执行功能模块、任务管理功能模块、信息交互功能模块;
2.根据权利要求1所述的一种无人集群协同控制系统,其特征在于,所述协同信息交互协议,其帧结构由帧头、信息头、数据段、帧尾四部分组成,其中信息头至少包含帧内容标记、源地址、目的地址、数据操作、数据段长度信息,通过对所述数据操作的不同定义,可以指定功能模块之间、不同无人平台之间的请求或写入数据操作,规定信息交互内容和方式;所述数据共享池,存储所有功能模块运行时需要使用数据的变量集合,包含在协同信息交互功能模块中,并由其进行统一读写操作管理。
3.根据权利要求2所述的一种无人集群协同控制系统,其特征在于,所述功能模块,按功能模块中算法的执行速度、运行频率等差异和任务需求,分别设计为周期式、响应式、顺序式三种运行模式;探测感知功能模块、信息融合功能模块、控制执行功能模块、信息交互功能模块设计为周期式运行模式,按固定频率循环运行;决策规划功能模块设计为响应式运行模式,按任务需求在给定信号或调用时才运行一次;任务管理功能模块设计为顺序式运行模式,根据任务状态变化按预定方式顺序执行。
4.根据权利要求3所述的一种无人集群协同控制系统,其特征在于,所述探测感知功能模块为信息融合功能模块提供信息输入,信息融合功能模块为决策规划功能模块、控制执行功能模块、任务管理功能模块提供信息输入,决策规划功能模块为控制执行功能模块、任务管理功能模块提供信息输入,控制执行功能模块通过控制无人平台实现状态更新,任务管理功能模块根据任务状态触发启动其它功能模块中的相关功能或算法以实现设计任务的顺序执行,信息交互功能模块根据协同信息交互协议与其它功能模块进行信息读写交互。
5.根据权利要求4中所述的一种无人集群协同控制系统,其特征在于,所述探测感知功能模块部署传感信息处理算法、目标识别算法,进行所述功能模块所在的无人平台探测传感器数据的处理并输出环境状态信息、目标状态信息;所述信息融合功能模块部署多源信息融合算法、目标估计算法、意图判断算法,进行多个无人平台数据融合计算并输出目标状态一致融合估计、目标运动轨迹预测、意图判定;所述决策规划功能模块部署目标分配算法、路径规划算法、博弈决策算法,进行无人平台任务目标指定、运动路径设计、执行动作计算;所述控制执行功能模块部署编队控制算法、制导控制算法,进行无人平台具体运动的精确控制;所述任务管理功能模块部署任务评估算法、任务流程管理算法,进行集群任务状态的监控、评估;所述信息交互功能模块部署组网通信管理算法、信息收发处理算法,进行协同控制功能模块之间、无人平台之间多向数据传输管理。
6.根据权利要求1-5中任一一种无人集群协同控制系统,其特征在于,所述控制系统至少包括无人机、无人车、无人船中的一种或多种无人平台的组合。
7.根据权利要求1-5中任一一种无人集群协同控制系统的扩展方法,其特征在于:
技术总结
本发明公开了一种无人集群协同控制系统,包括探测感知功能模块、信息融合功能模块、决策规划功能模块、控制执行功能模块、任务管理功能模块、信息交互功能模块。基于黑板通信机制、进程间通信和UDP通信技术,以信息交互功能模块为数据交互管理的核心,通过协同信息交互协议与数据共享池的方式来实现功能模块之间,以及不同无人平台之间的信息交互。按功能模块中算法的执行速度、运行频率等差异和任务需求,将不同协同控制功能模块设计为周期式、响应式、顺序式三种运行模式,实现不同算法程序的差异化运行。基于以上控制系统和运行方法,通过新增功能模块、建立通信渠道、设计运行触发机制,可以实现无人集群协同控制系统的便捷扩展。
技术研发人员:赵长春,奚勇,陈光山,贾成龙,胡阳修,孟海洋
受保护的技术使用者:上海航天控制技术研究所
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!