一种遥控越野载具的制作方法
本发明属于越野车辆试验,具体涉及一种遥控越野载具。
背景技术:
1、随着时代的进步,地面无人车辆的研究越来越深入,越野无人车领域的关注度也越来越高。越野无人车辆需要通过试验考核车辆跟随、无人编队等性能指标,由于单车造价成本高,如果发生车辆碰撞事故,必然会造成不必要的经济损失;另外,若有人驾驶车辆参与试验,驾驶员生命安全难以保障,试验过程中安全隐患较大。为此,遥控越野载具代替有人驾驶车辆参与试验具有重要意义。
技术实现思路
1、(一)要解决的技术问题
2、本发明要解决的技术问题是:提供一种遥控越野载具,能够在越野路况下具备良好的机动性,具备远程遥控能力,能够根据野外工作需要进行载具改装。
3、(二)技术方案
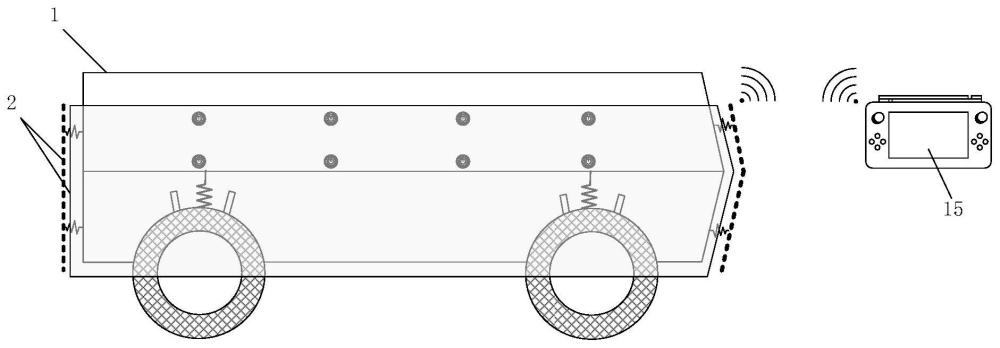
4、为解决上述技术问题,本发明提供一种所述车体模组包括:主车体1、附属子车体2;
5、所述主车体1上部设有运载结构,所述附属子车体2设置在主车体1外部,通过弹性连接件连接主车体1;
6、所述行动模组共设有四组分别与主车体1连接,设置在主车体1底部;
7、所述动力模组设置在主车体1内部底板上,所述感知与导航模组与控制模组设置在主车体1侧板平台处;
8、所述控制模组包括:载具综合控制器8、电气控制器9、电机控制器10、制动控制器11;
9、所述载具综合控制器8通过can线分别与电气控制器9、电机控制器10、制动控制器11连接;
10、所述感知与导航模组包括:视频处理模块12、导航模块13;
11、所述视频处理模块12用于采集音视频,通过网线与载具综合控制器8连接;
12、所述导航模块13用于获取载具位置以及位姿信息,通过can线与载具综合控制器8连接;
13、所述遥控终端15用于接收视频处理模块12采集的音视频以及载具运行状态远程察看,下发载具行动指令至载具综合控制器8完成对载具机动性能控制;
14、所述载具综合控制器8包括:远程交互模块、指令解析模块、路径规划与跟踪控制模块、载具控制模块、载具状态信息模块;
15、所述视频处理模块12采集的音视频和载具状态信息通过远程交互模块发送至遥控终端15;
16、所述远程交互模块接收遥控终端15的行动指令,并通过指令解析模块对行动指令进行处理,处理后的行动指令信息和导航模块13采集的位置、位姿信息发送至入路径规划跟踪控制模块,实时规划短时间短距离行动路径,并生成运动控制指令发送至载具控制模块;
17、载具控制模块将指令信息发送至电气控制器9、电机控制器10以及制动控制器11,完成对载具行动控制。
18、其中,每组所述行动模组包括:独立悬架3、轮胎5、轮毂电机与制动器4;
19、所述独立悬架3、轮毂电机、制动器4、轮胎5集成为行动单元,通过独立悬架3连接主车体1,四组行动单元分别设置在主车体1左前、右前、左后、右后位置处。
20、其中,所述轮毂电机设置为外转子永磁同步电机,通过电机控制器10控制轮毂电机。
21、其中,所述动力模组包括:高压电池模组6、低压电池模组7;
22、所述高压电池模组6用于驱动轮毂电机,所述低压电池模组7用于为控制模组及其他用电设备供电。
23、其中,所述电机控制器10采用电机转矩控制模式,制动控制器11采用液压式线控制动模式。
24、其中,所述遥控越野载具还设有照明设备14,照明设备14设置在主车体1上,用于照明和安全提示。
25、(三)有益效果
26、与现有技术相比较,本发明具备如下有益效果:通过遥控终端控制载具行动,避免了驾驶员直接参与越野无人车辆性能试验,从而减少了安全隐患。遥控越野载具造价成本较低,部分试验情况下,取代样本车辆,辅助完成性能试验。载具行动控制流程区别于传统的直接转矩分配控制流程,增加了路径规划和跟踪控制过程,能够减小整车装配、电机控制不稳定带来的载具偏驶现象,在越野路况下具备良好的机动性。根据野外工作需要进行载具改装,可用于运输等工作。
技术特征:
1.一种遥控越野载具,其特征在于,包括:车体模组、行动模组、动力模组、控制模组、感知与导航模组、遥控终端;
2.如权利要求1所述的遥控越野载具,其特征在于,每组所述行动模组包括:独立悬架(3)、轮胎(5)、轮毂电机与制动器(4);
3.如权利要求1所述的遥控越野载具,其特征在于,所述轮毂电机设置为外转子永磁同步电机,通过电机控制器(10)控制轮毂电机。
4.如权利要求1所述的遥控越野载具,其特征在于,所述动力模组包括:高压电池模组(6)、低压电池模组(7);
5.如权利要求1所述的遥控越野载具,其特征在于,所述电机控制器(10)采用电机转矩控制模式,制动控制器(11)采用液压式线控制动模式。
6.如权利要求1所述的遥控越野载具,其特征在于,所述遥控越野载具还设有照明设备(14),照明设备(14)设置在主车体(1)上,用于照明和安全提示。
技术总结
本发明涉及一种遥控越野载具,属于越野车辆试验技术领域。包括车体模组、行动模组、动力模组、控制模组、感知与导航模组、遥控终端。车体模组包括主车体、附属子车体,主车体用于连接载具其他组成部件,附属子车体通过弹性连接件连接主车体,用于保护主车体,减小碰撞损坏。行动模组包括独立悬架、轮毂电机、制动器、轮胎。动力模组包括高压电池模组、低压电池模组。控制模组包括载具综合控制器、电气控制器、电机控制器、制动控制器。感知与导航模组包括视频处理模块、导航模块。遥控越野载具能够在越野路况下具备良好的机动性,具备远程遥控能力,能够根据野外工作需要进行载具改装,可服务于越野无人系统自主性能试验。
技术研发人员:于海,张月,曾日芽,李杰,钟必清,靳聪,崔昊巍,方国昌
受保护的技术使用者:中国北方车辆研究所
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!