一种光电伺服的目标跟踪模拟方法、装置及仿真无人机
本发明涉及模拟仿真,尤其涉及一种光电伺服的目标跟踪模拟方法、装置及仿真无人机。
背景技术:
1、随着无人机技术的日趋成熟,无人机任务载荷操作手的需求量也在不断增加,尤其是具有锁定跟踪目标功能的无人机任务载荷操作手。无人机任务载荷操作手操控技术的熟练度,在很大程度上决定了侦查任务的效率和成功率,而掌握熟练任务载荷操控技术需要进行大量的训练。如果采用实际装备真机外场实飞对无人机任务载荷操作手进行训练,需要消耗大量的时间、人力和物力成本,不仅无法保证经验不足的操作手可能造成的损失,而且在任务模拟、天气条件和时间条件上还具有一定的局限性,无法快速培养大量具有高熟练度操作技术的光电载荷操作手。以上这些问题均会严重影响侦察型无人机的实际使用。
技术实现思路
1、鉴于上述的分析,本发明旨在公开了一种光电伺服的目标跟踪模拟方法、装置及仿真无人机。以解决锁定跟踪目标功能的模拟问题以及无人机操作手的模拟训练问题。
2、本发明一方面公开了一种光电伺服的目标跟踪模拟方法,包括:
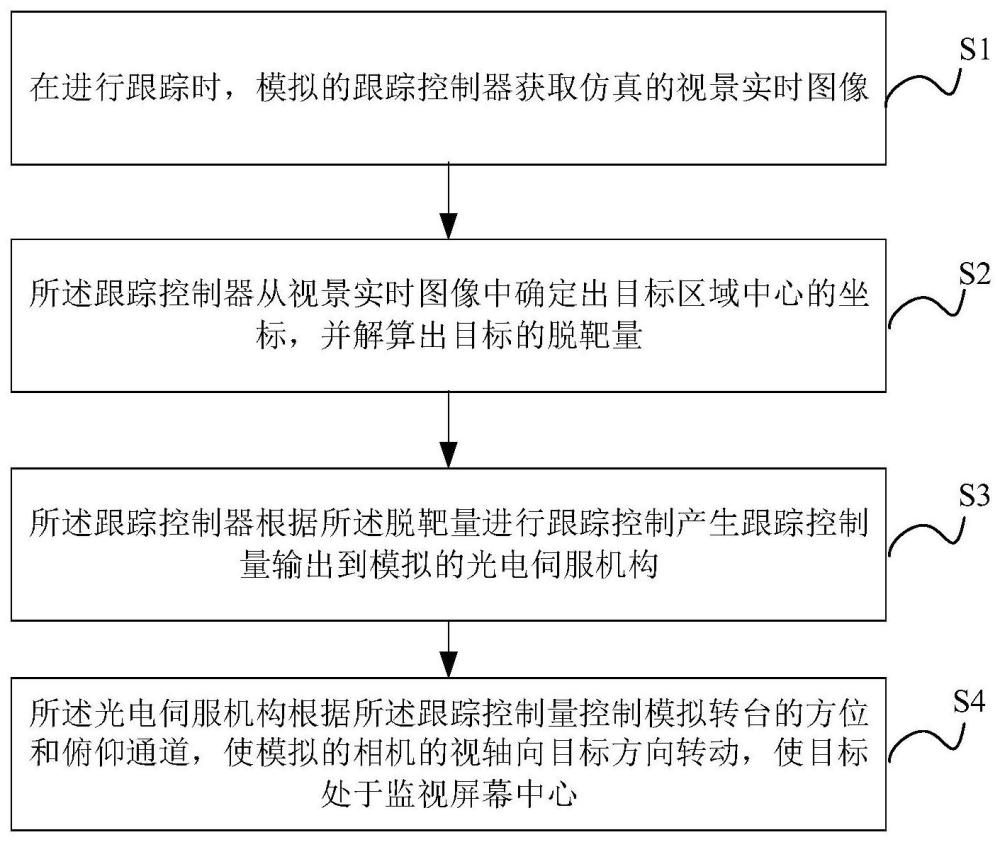
3、在进行跟踪时,模拟的跟踪控制器获取仿真的视景实时图像;
4、所述跟踪控制器从视景实时图像中确定出目标区域中心的坐标,并解算出目标的脱靶量;
5、所述跟踪控制器根据所述脱靶量进行跟踪控制产生跟踪控制量输出到模拟的光电伺服机构;
6、所述光电伺服机构根据所述跟踪控制量控制模拟转台的方位和俯仰通道,使模拟的相机的视轴向目标方向转动,使目标处于监视屏幕中心;
7、根据所述视景实时图像的帧频率,确定基准时间以进行下一次的跟踪。
8、进一步地,所述目标脱靶量为目标区域中心在监视屏幕上的坐标与监视屏幕中心坐标之间的偏差量。
9、进一步地,所述跟踪控制器从实时图像中确定出目标区域中心的坐标为无人机地理坐标系中的位置坐标,通过坐标转换得到目标区域中心在跟踪显示屏幕上的坐标。
10、进一步地,坐标转换的过程包括:
11、1)建立包括世界坐标系、无人机地理坐标系、无人机机体坐标系和视点坐标系在内的多个坐标系;
12、2)进行第一次坐标转换;根据无人机和目标区域中心在世界坐标系下的坐标,进行世界坐标系到无人机地理坐标系的转换,得到目标区域中心在无人机体坐标系下的坐标;
13、3)进行第二次坐标转换;进行无人机地理坐标系到无人机体坐标系的转换,得到目标区域中心在无人机体坐标系下的坐标;
14、4)进行第三次坐标转换,根据相机中心点在机体坐标系中的坐标,进行无人机体坐标系到视点坐标系的转换,得到目标区域中心在视点坐标系下的坐标;
15、5)进行归一化;将目标区域中心在视点坐标系下的坐标,根据视点垂直方向上的视角进行归一化得到视点坐标系下归一化后的坐标;
16、6)进行第四次坐标转换,根据目标区域中心在视点坐标系下的归一化后的坐标,进行视点坐标系到屏幕坐标系的转换,得到目标区域中心在屏幕坐标系下的坐标。
17、进一步地,所述目标区域中心在视点坐标系下的坐标:
18、
19、其中,
20、
21、
22、(xc,yc,h)为无人机在世界坐标系下的坐标;
23、(xt,yt,zt)为目标区域中心在世界坐标系下的坐标;
24、(tx,ty,tz)为相机的中心点在无人机机体坐标系中的坐标;
25、ψ为无人机绕无人机地理坐标系轴zs航向角;θ为无人机绕无人机地理坐标系轴xs俯仰角;γ为无人机绕无人机地理坐标系轴ys滚转角;α为相机绕无人机机体坐标系轴za的方位角,β为相机绕无人机机体坐标系轴xa的俯仰角。
26、进一步地,目标区域中心在视点坐标系下归一化后的坐标:
27、
28、其中,视点投影矩阵:
29、
30、fov为视点垂直方向的视角;f为视点的焦距;
31、视点显示宽高比:
32、
33、width为视点显示宽度;height为视点显示宽度;
34、进一步地,目标区域中心在屏幕坐标系下的坐标
35、其中,视点坐标到屏幕坐标的矩阵:
36、
37、进一步地,所述跟踪控制器根据所述脱靶量进行pid控制产生跟踪控制量。
38、本发明还公开了一种光电伺服的目标跟踪模拟装置,包括跟踪控制器、模拟光电伺服机构、模拟转台和基准时间确定模块;
39、所述跟踪控制器与模拟光电伺服机构连接,用于在进行跟踪时,从仿真的视景实时图像中确定出目标区域中心的坐标,解算出目标的脱靶量;并根据所述脱靶量进行跟踪控制产生跟踪控制量输出到模拟光电伺服机构;
40、所述模拟光电伺服机构与模拟转台连接;根据所述跟踪控制量控制模拟转台的方位和俯仰通道,带动模拟的相机的视轴向目标方向转动,使目标处于监视屏幕中心;
41、所述基准时间确定模块,用于根据所述视景实时图像的帧频率,确定基准时间以进行下一次的跟踪。
42、本发明还公开了一种仿真无人机,包括如上所述的光电伺服的目标跟踪模拟装置。
43、本发明可实现以下有益效果之一:
44、本发明公开的光电伺服的目标跟踪模拟方法、装置及仿真无人机,可以根据仿真的视景实时图像,利用仿真的光电伺服机构和仿真转台实现对视景实时图像中目标的跟踪模拟;可以实现在无需真机飞行情况下进行无人机任务载荷频次的侦察任务模拟训练,训练场景逼真,训练效果好,并且大大节约训练的人力、物力和财力。
技术特征:
1.一种光电伺服的目标跟踪模拟方法,其特征在于,包括:
2.根据权利要求1所述的光电伺服的模拟方法,其特征在于,所述目标脱靶量为目标区域中心在监视屏幕上的坐标与监视屏幕中心坐标之间的偏差量。
3.根据权利要求2所述的光电伺服的模拟方法,其特征在于,所述跟踪控制器从实时图像中确定出目标区域中心的坐标为无人机地理坐标系中的位置坐标,通过坐标转换得到目标区域中心在跟踪显示屏幕上的坐标。
4.根据权利要求3所述的光电伺服的模拟方法,其特征在于,坐标转换的过程包括:
5.根据权利要求4所述的光电伺服的模拟方法,其特征在于,所述目标区域中心在视点坐标系下的坐标:
6.根据权利要求5所述的光电伺服的模拟方法,其特征在于,目标区域中心在视点坐标系下归一化后的坐标:
7.根据权利要求6所述的光电伺服的模拟方法,其特征在于,目标区域中心在屏幕坐标系下的坐标
8.根据权利要求1-7任一项所述的光电伺服的模拟方法,其特征在于,所述跟踪控制器根据所述脱靶量进行pid控制产生跟踪控制量。
9.一种根据权利要求1-8所述的光电伺服的目标跟踪模拟方法的目标跟踪模拟装置,其特征在于,包括跟踪控制器、模拟光电伺服机构、模拟转台和基准时间确定模块;
10.一种仿真无人机,其特征在于,包括如权利要求9所述的光电伺服的目标跟踪模拟装置。
技术总结
本发明涉及一种光电伺服的目标跟踪模拟方法、装置及仿真无人机;其中方法包括:在进行跟踪时,模拟的跟踪控制器获取仿真的视景实时图像;所述跟踪控制器从视景实时图像中确定出目标区域中心的坐标,并解算出目标的脱靶量;所述跟踪控制器根据所述脱靶量进行跟踪控制产生跟踪控制量输出到模拟的光电伺服机构;所述光电伺服机构根据所述跟踪控制量控制模拟转台的方位和俯仰通道,使模拟的相机的视轴向目标方向转动,使目标处于监视屏幕中心;根据所述视景实时图像的帧频率,确定基准时间以进行下一次的跟踪。本发明实现了在无需真机飞行情况下进行无人机任务载荷频次的侦察任务模拟训练。
技术研发人员:张振,李五洲,张文伟,朱海,毕嘉,张翼,周湃
受保护的技术使用者:中国人民解放军陆军航空兵学院
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!