一种远程遥控无人车高速直线行驶稳定性控制方法与流程
本发明涉及车辆控制,具体的,本发明应用于远程遥控无人车控制,特别是涉及一种远程遥控无人车高速直线行驶稳定性控制方法。
背景技术:
1、随着技术的进步,远程遥控无人车成为当今技术发展的必然,尤其是在特种车辆上,需要驾驶员通过远程控制来操作车辆;这种技术主要依赖于先进的传感器、算法和网络通信技术。
2、1.传感器:无人车装备了多种传感器,包括摄像头、雷达、激光雷达(lidar)和惯性测量单元(imu)等;这些传感器用于捕捉周围环境的信息,包括其他车辆、行人、交通信号、道路标记等,并以此为基础进行导航和决策。
3、2.算法:无人车搭载的高级算法可以处理从传感器获取的大量数据,并通过这些数据来识别道路、预测其他车辆和行人的行为、规划最佳行驶路线等;这些算法通常包括机器学习、深度学习和路径规划等。
4、3.网络通信:无人车通过网络与其他车辆或远程服务器进行通信,以实现实时交通信息和行驶指令的交换;这种通信技术对于实现远程遥控尤其重要。
5、在现有的远程遥控无人车的操控方式中,普遍采用视频传输来实现无人车的驾驶。这种操控方式的基本原理是将无人车的摄像头拍摄到的视频传输到远程控制中心,然后由操作员根据视频中的信息进行驾驶决策,再通过网络将控制指令传输回无人车。
6、然而,这种基于视频传输的操控方式存在视频延迟问题:远程遥控无人车主要利用的无线通讯传输电台、4g、5g等远距离传输手段,特别是在偏远山区时可能只能通过无线通讯传输电台实现通讯;由于网络延迟、处理延迟等各方面因素的影响,从无人车拍摄的视频到远程控制中心,再到返回控制指令到无人车,这个过程中会存在一定的时间延迟;这种延迟可能导致以下安全隐患:
7、首先,当无人车在高速行驶时,这种延迟可能导致车辆无法及时做出避障、刹车、回正等紧急操作,从而引发事故。其次,操作员根据延迟的视频进行驾驶决策,可能会因为信息的滞后而导致决策错误;例如,操作员可能在看到一个行人后才做出刹车决策,但这个决策可能已经太晚,导致事故发生。最后,对于高速行驶的无人车,操作员往往需要具备高超的驾驶技巧和快速反应能力;但由于视频延迟的存在,操作员可能无法适应这种高速环境,从而导致不安全的操作。
技术实现思路
1、本发明的目的在于,针对现有技术中的上述问题,提供一种远程遥控无人车高速直线行驶稳定性控制方法,进而解决现有技术中由于视频延迟,导致无人车在高速行驶时无法保持平稳状态的问题。
2、为解决上述技术问题,本发明的具体技术方案如下:
3、本发明提供一种远程遥控无人车高速直线行驶稳定性控制方法,包括如下步骤:
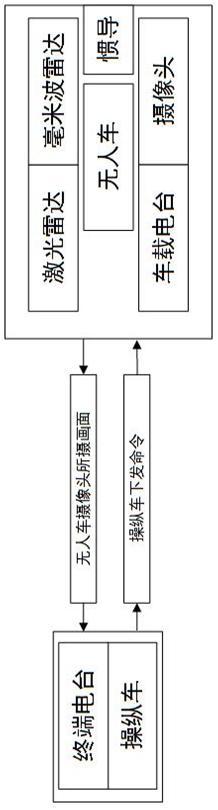
4、配置操作端和配置车载端,所述配置车载端包括在无人车上配置传感器、车载电台、上位机和整车控制器;所述操作端包括终端电台和操纵车,所述操纵车通过所述终端电台与所述车载电台通讯;所述操纵车用于生成所述操控指令,并通过所述终端电台将所述操控指令传输至所述车载电台;所述操控指令包括油门开度信号;
5、所述传感器用于获取车辆信息,并将所述车辆信息发送给所述车载电台和所述上位机,所述车载电台将所述车辆信息发送至所述操作端;所述传感器包括激光雷达、毫米波雷达、惯导和摄像头;所述摄像头安装在无人车上方,用于获取无人车前方视频画面,将摄像头采集的无人车前方视频画面经过编码器压缩转为网络信号,传递给车载电台,通过车载电台传递到操作端;
6、所述上位机根据所述车辆信息生成车辆当前状态信息;
7、所述操作端下发操控指令并传输至所述车载端,所述车载端通过所述车载电台接收所述操控指令并传输给所述上位机;所述车辆信息包括视频画面;所述车载电台将所述车辆信息发送至所述操作端进一步包括:所述车载电台将所述视频画面传输至所述终端电台,所述终端电台将所述视频画面传输给所述操纵车,操作员根据视频画面进行驾驶决策,通过操纵车下发操作指令;
8、所述上位机根据所述车辆当前状态信息和所述操控指令生成控制信号,并发送给所述整车控制器,所述整车控制器通过控制信号控制所述车载端。
9、作为一种改进方案,当无人车驾驶在城市道路中时,道路中央具有清晰的车道线,或者残缺不全的车道线,需要保证在操纵车上操纵无人车并使无人车在高速下稳定行驶;车载端通过车载电台收到操作端的操作指令,车辆接收到油门开度信号后,会使车辆直线行驶,但是可能由于机械或者其它原因,导致车辆出现侧偏,此时通过传感器采集的信息,使车辆自动回正,满足操纵车上的驾驶员期望,由于延迟,驾驶员可能对于车辆的实际状态出现误判,无人车根据周围环境和远程遥控下发的操作指令进行判断,对于无人车下一步运动做出适当的调整,无人车驾驶在城市道路行驶时的控制方法具体实现方式如下:
10、所述车辆信息还包括实时航向角;
11、所述上位机根据所述车辆信息生成车辆当前状态信息进一步包括:
12、所述上位机根据所述视频画面识别出车辆距左右侧车道线距离;所述上位机根据所述车辆距左右侧车道线距离和所述实时航向角生成车辆偏转信息,根据车辆偏转信息判断车辆行驶方向是否为直线行驶,如果不是直线行驶,所述上位机整合所述车辆偏转信息和所述油门开度信号,得到所述控制信号;所述整车控制器通过控制信号控制所述无人车保持直线行驶。
13、作为一种改进方案,当无人车驾驶在越野路面时,由于越野路面没有车道线,无法准确确定自身位置,路面环境复杂,容易发生事故,想在越野保持直线行驶,操纵车上的无人车驾驶员通过视频对车辆进行直线行驶命令,此时,由于实际道路环境复杂,无人车无法满足直线行驶;通过本方法实现无人车驾驶在越野路面高速行驶时保持直线行驶,具体实现方式如下:
14、所述车辆信息还包括车辆坐标信息;所述上位机存储一段时间内的车辆坐标信息得到历史坐标信息;
15、所述上位机根据所述车辆信息生成车辆当前状态信息进一步包括:
16、所述上位机根据所述历史坐标信息生成车辆运行轨迹;所述上位机根据所述车辆运行轨迹和当前的车辆坐标信息生成车辆偏转信息,根据车辆偏转信息判断车辆运行轨迹是否是沿直线行驶的,若不是,所述上位机整合所述车辆偏转信息和所述油门开度信号,得到所述控制信号;所述整车控制器通过控制信号控制所述无人车保持直线行驶。
17、本发明技术方案的有益效果是:本发明的远程遥控无人车高速直线行驶稳定性控制方法,应用于采用视频传输来实现无人车的驾驶控制中,有效的避免了由于视频延迟造成的安全隐患,使无人车在高速行驶时保持平稳状态,保证无人车沿直线或预定路线行驶,弥补了现有技术的缺陷,具有极高的应用价值。
技术特征:
1.一种远程遥控无人车高速直线行驶稳定性控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种远程遥控无人车高速直线行驶稳定性控制方法,其特征在于:所述操作端包括终端电台和操纵车,所述操纵车通过所述终端电台与所述车载电台通讯。
3.根据权利要求2所述的一种远程遥控无人车高速直线行驶稳定性控制方法,其特征在于:所述操纵车用于生成所述操控指令,并通过所述终端电台将所述操控指令传输至所述车载电台。
4.根据权利要求3所述的一种远程遥控无人车高速直线行驶稳定性控制方法,其特征在于:所述操控指令包括油门开度信号。
5.根据权利要求4所述的一种远程遥控无人车高速直线行驶稳定性控制方法,其特征在于:所述车辆信息包括视频画面;
6.根据权利要求5所述的一种远程遥控无人车高速直线行驶稳定性控制方法,其特征在于:所述车辆信息还包括实时航向角;
7.根据权利要求5所述的一种远程遥控无人车高速直线行驶稳定性控制方法,其特征在于:所述车辆信息还包括车辆坐标信息;所述上位机存储第一时段内的车辆坐标信息得到历史坐标信息;
8.根据权利要求6或7所述的一种远程遥控无人车高速直线行驶稳定性控制方法,其特征在于:所述上位机根据所述车辆当前状态信息和所述操控指令生成控制信号,并发送给所述整车控制器,所述整车控制器通过控制信号控制所述车载端,进一步包括:所述上位机整合所述车辆偏转信息和所述油门开度信号,得到所述控制信号;所述整车控制器通过控制信号控制所述无人车保持直线行驶。
9.根据权利要求8所述的一种远程遥控无人车高速直线行驶稳定性控制方法,其特征在于:所述传感器包括激光雷达、毫米波雷达、惯导和摄像头。
10.根据权利要求9所述的一种远程遥控无人车高速直线行驶稳定性控制方法,其特征在于:所述摄像头安装在无人车上方,用于获取无人车前方视频画面,将摄像头采集的无人车前方视频画面经过编码器压缩转为网络信号,传递给车载电台,通过车载电台传递到操作端。
技术总结
本发明公开了一种远程遥控无人车高速直线行驶稳定性控制方法,包括以下步骤:配置操作端和配置车载端,配置车载端包括在无人车上配置传感器、车载电台、上位机和整车控制器;传感器用于获取车辆信息,并将车辆信息发送给车载电台和上位机,车载电台将车辆信息发送至操作端;上位机根据车辆信息生成车辆当前状态信息;操作端下发操控指令并传输至车载端,车载端通过车载电台接收操控指令并传输给上位机;上位机根据车辆当前状态信息和操控指令生成控制信号,并发送给整车控制器,整车控制器通过控制信号控制车载端,通过本发明提出的控制方法,远程遥控车在高速状态下保证直线稳定性或沿道路中心线行驶。
技术研发人员:刘英哲,张前,田申,赵坤
受保护的技术使用者:江苏英拓动力科技有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!