一种消杀机器人路径规划方法
本发明涉及一种面向室内自动消杀应用中消杀机器人路径规划算法,属于机器人智能控制领域。
背景技术:
1、室内消杀是卫生防疫的常用手段,可以有效灭杀空气中的病毒和细菌,避免传播感染。传统的室内消杀多采用人工消杀方式,但耗时费力,且容易造成人员感染。机器人自动消杀方式可以极大降低人员成本、简化管理、避免交叉感染,且可以通过智能控制方式实现按需消杀或个性化消杀,达到快速消杀和药液节约。消杀机器人一般通过喷雾的形式将消毒药液挥发到空间中,当空气中药液浓度达到一定程度时即可灭杀环境中的病毒。为了保证消杀效果,必须保证药液在室内空间的全覆盖,且浓度超过一定阈值。
2、现有的机器人路径规划算法主要分为障碍空间的路径规划和自由空间的路径规划两类。自由空间的路径规划算法主要用于空旷的室内环境或者室外空间的路径规划,如无人机监控等。自由空间的路径规划通常根据区域的形状和面积等信息建立环境模型,以路径覆盖率和机器人运行时间为优化目标,保证机器人或无人机能更加精确、高效和节能地完成任务。常用的自由空间路径规划算法有蚁群算法、a*算法、模糊逻辑控制算法和滚动窗口法等。障碍空间的路径规划主要是指机器人或者无人车参照某个优化目标,如工作代价值最低,选择路径最短,运算时间消耗最短等,在任务区域选择出一条可从起点连接到终点的最优或次优的避障路径。障碍空间路径规划的常用方法包括遗传算法、快速随机搜索树算法等,可以快速找到机器人或智能小车在地面障碍空间的避障路径,可以实现对地面空间的全覆盖。但是现有的自由空间路径规划算法和障碍空间路径规划算法重点在于完成移动空间平面上的覆盖,如机器人对地面空间的覆盖、无人机对对投影平面的覆盖等,即路径轨迹和覆盖区域在同一个平面。而消杀机器人的路径规划问题,路径轨迹是地面障碍空间,而药液覆盖区域是空中,即路径轨迹和覆盖区域不在同一平面,且二者空间特征也不相同。
3、消杀机器人路径规划问题的目标是尽快完成药液对室内空间的覆盖,约束则是消杀机器人在室内障碍空间的移动轨迹。本发明对消杀机器人的消杀药液扩散进行建模,并基于该模型提出一种全覆盖路径规划算法,既可以满足机器人在障碍空间里路径规划的约束,又可以实现消消杀效果的精确控制。该方法可以用于大中小不同规模和结构的室内空间,以及不同类型的消杀机器人。
技术实现思路
1、本发明提供一种消杀机器人路径规划方法,根据地面障碍空间路径规划与药液自由空间扩散模型相结合的方式,以消杀药液的快速覆盖为目标,使用栅格法将障碍空间分割为消杀机器人移动单元,根据转向能耗及药液覆盖综合判断消杀机器人的最优移动方向和位置,使用死区逃离策略避免消杀机器人的移动陷入死区,最终保证消杀机器人能够最短时间实现室内空间消杀药液的全覆盖。
2、本发明采用的技术方案如下:
3、一种消杀机器人路径规划方法,具体包括如下步骤:
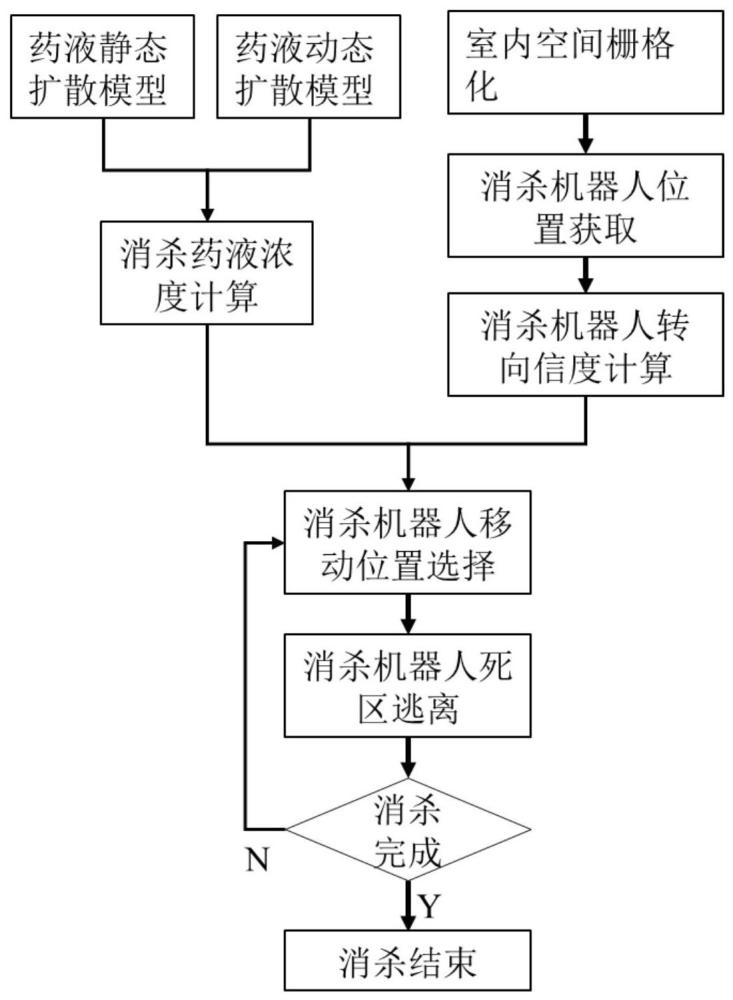
4、(1)消杀药液喷雾扩散模型构建:综合考虑消杀药液的静态扩散模型和动态扩散模型,以室内空间的天花板平面为药液浓度的消杀效果的评判标准;
5、(2)室内空间栅格化:将消杀机器人工作的室内空间划分为相同大小的栅格,每个栅格作为路径规划的基本单位;
6、(3)消杀机器人移动位置选择:综合考虑消杀机器人的能耗和室内空间的消杀药液浓度,确定消杀机器人下一步的移动位置;
7、(4)消杀机器人死区逃离:当消杀机器人周围均为障碍物或药液浓度达到要求,则快速逃离到最近的待消杀区域继续工作。
8、本发明的有益效果为:
9、(1)根据消杀药液的浓度和能耗综合规划消杀机器人的路径,减少消杀机器人的移动路径,可以在短时间内完成室内消杀任务。
10、(2)综合考虑消杀药液的静态和动态扩散模型,并在消杀机器人的路径规划中考虑药液浓度的变化,在保证消杀效果的同时节约消杀药液的用量。
11、(3)空间栅格化和死区逃离策略可以应对复杂的室内环境,提高消杀机器人的环境适应性。
技术特征:
1.一种消杀机器人路径规划方法,其特征在于,该方法具体包括如下步骤:
2.根据权利要求1所述的一种消杀机器人路径规划方法,其特征在于,所述步骤(1)的具体步骤如下:
3.根据权利要求1所述的一种消杀机器人路径规划方法,其特征在于,所述步骤(3)的具体步骤如下:
4.根据权利要求1所述的一种消杀机器人路径规划方法,其特征在于,所述步骤(4)的具体步骤如下:
技术总结
本发明公开了一种消杀机器人路径规划方法。该方法的步骤包括:(1)建立消杀药液喷雾扩散模型,包括静态扩散模型和动态扩散模型;(2)室内空间栅格化,将室内空间离散化和规则化;(3)消杀机器人移动位置选择,根据消杀机器人移动能耗及药液浓度综合判定消杀机器人下一步移动位置;(4)消杀机器人死区逃离,避免消杀机器人陷入死区,快速完成消杀任务。本发明能显著提高消杀机器人的消杀效率。
技术研发人员:丁有伟,石泽磊,王梦茹,杨晓霏,张天然,李艺,戴彩艳
受保护的技术使用者:南京中医药大学
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!