一种飞行器复合故障诊断及控制补偿方法及系统与流程
本发明涉及一种飞行器复合故障诊断及控制补偿方法及系统,属于飞行器飞行控制。
背景技术:
1、复合故障诊断及控制补偿是指飞行控制系统发生执行机构故障、传感器故障后,通过基于观测器的故障诊断技术估计出故障参数,利用已估计参数补偿原控制律,进而抑制由故障引起的飞行性能下降,从而更精准地控制飞行器姿态系统。当飞行器发生副翼效能损失故障时,翼面始终无法付出期望力矩,导致系统响应缓慢,此外姿态稳定系统舵面需求较大情况下翼面无法付出足够的力矩,可能造成姿态角无法到位甚至姿态系统发散的后果。当飞行器发生俯仰角速度传感器故障时,控制系统获取的状态量反馈包含传感器故障信息,受故障影响的控制律作用于执行机构,导致姿态稳定系统不能精确跟踪指令。而当多个故障同时发生时,故障所处通道相互耦合构成复合故障,复合故障的耦合特性增大了诊断难度。因此,针对复合故障下的飞行器姿态稳定控制问题,采取基于观测器的故障诊断及控制补偿技术,提高飞行器的飞行品质。
2、目前常用的故障诊断方法主要有基于数据的和基于模型的诊断方法。其中,基于数据的诊断方法如神经网络、聚类等技术对对象模型的依赖度较低,对系统输入输出敏感,通过飞行器状态量和观测量的匹配确定故障类别,而复合故障的高度耦合会严重降低此类方法剥离故障信息的能力,影响故障诊断的准确性;基于模型的诊断方法如观测器、滤波算法等技术对对象建模的精确度要求较高,通过系统输出反馈构建残差,利用残差收敛实现估计值对故障参数的逼近,而传统基于模型的诊断方法在应对复杂飞控系统的复合故障时,通道如何解耦成为解决问题的难点。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提供了一种飞行器复合故障诊断及控制补偿方法及系统,解决飞行器系统发生多个故障且故障信息在通道中交耦引起诊断困难的问题,依据对故障参数的估计值补偿进控制律,抑制复合故障对飞行性能的降低。
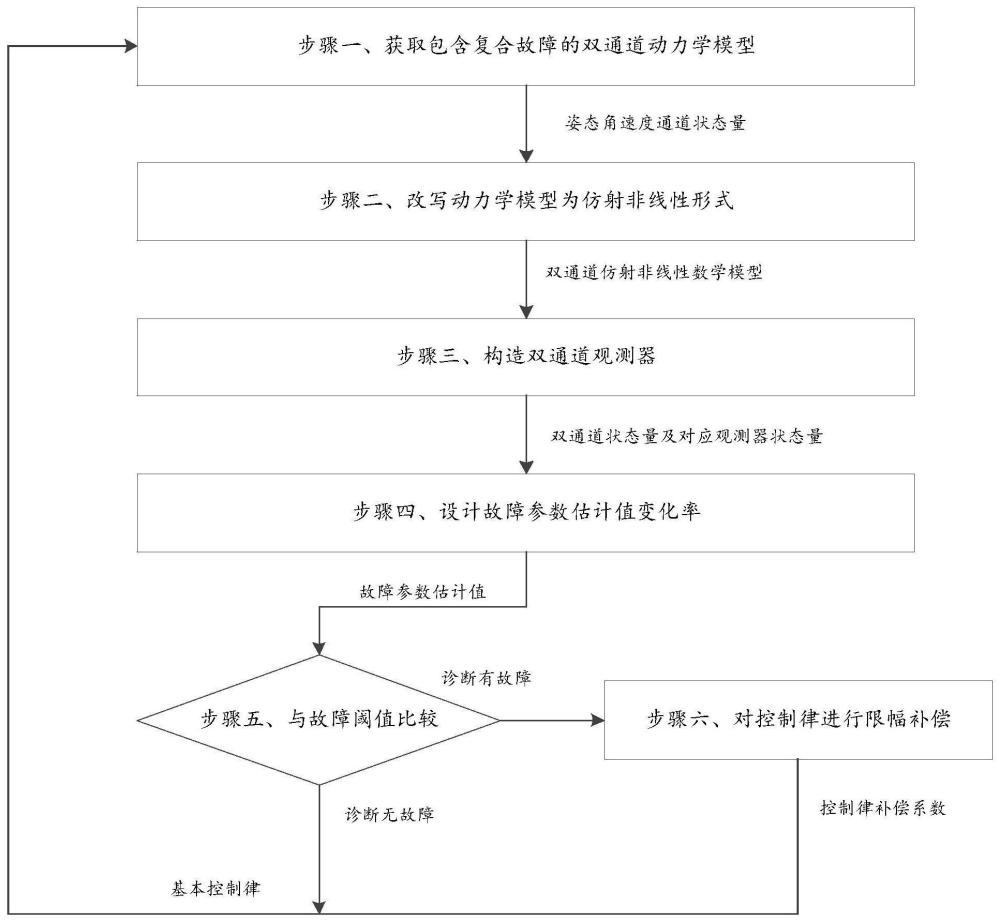
2、本发明的技术解决方案是:一种飞行器复合故障诊断及控制补偿方法,包括:
3、确定待诊断复合故障的故障形式,获取包含复合故障的双通道动力学模型;
4、改写包含复合故障的双通道动力学模型为仿射非线性形式,其中故障项为仿射非线性形式中的等效线性输入形式;
5、对双通道动力学模型分别构建对应的观测器;
6、设置双通道的观测器的故障参数估计值变化率,确保复合故障参数估计值均收敛到故障真值;
7、确定故障诊断阈值,并通过比较故障估计值与故障阈值判断是否发生故障,得到故障诊断结果;
8、依据故障诊断结果,判断是否对控制律进行补偿,并在补偿时对补偿系数进行限幅处理。
9、进一步地,所述待诊断复合故障的故障形式包括:其中,δa、q分别为副翼、俯仰角速度,δa′、q′为故障后的状态量,λa、η为故障参数。
10、进一步地,仿射非线性形式的包含复合故障的双通道动力学模型包括:
11、
12、
13、其中,选取的双通道分别为滚转角速度通道和偏航角速度通道f1(x,u)、f2(x,u)为仿射非线性形式中的非线性可观状态量,x,u分别代表状态量和控制输入,g1q+h1λaδa、g2q+h2λaδa为仿射非线性形式中的等效线性输入形式,g1、g2、h1、h2为俯仰角速率q与副翼偏角δa的系数。
14、进一步地,双通道对应的观测器包括:
15、
16、
17、其中,为观测器单元状态误差,为故障参数λa的估计值,为故障参数η的估计值,κ1、κ2分别为两观测器的收敛速率系数。
18、进一步地,所述故障参数估计值变化率为其中,分别为故障参数估计值的变化率,e1、e2为观测器单元状态误差,g1、g2、h1、h2为俯仰角速率q与副翼偏角δa的系数。
19、进一步地,所述故障诊断阈值为γ1=0.05,γ2=0.01(°/s),其中γ1,γ2分别为故障参数估计值的对应的阈值;当表明副翼出现效能损失故障;当表明俯仰角速度传感器出现偏置故障;为故障参数估计值。
20、进一步地,所述对控制律进行补偿包括:
21、
22、
23、
24、
25、其中,δ″a和q″是用于设计补偿控制律的参数,为故障参数估计值,δa、q分别为副翼、俯仰角速度,分别为对故障参数估计值限幅后的变量,使用δ″a和q″替换原控制律中的δa、q实现控制律补偿。
26、一种飞行器复合故障诊断及控制补偿系统,包括飞行控制器单元、传感器单元、观测器单元、执行器传递单元;
27、传感器单元,用于获取飞行器实时的姿态信息,确定待诊断复合故障的故障形式,获取包含复合故障的双通道动力学模型,并将包括双通道动力学模型的飞行器信息传递给飞行控制单元以及观测器单元;
28、观测器单元,用于根据飞行器信息改写包含复合故障的双通道动力学模型为仿射非线性形式,其中故障项为仿射非线性形式中的等效线性输入形式;对双通道动力学模型分别构建对应的观测器;设置双通道的观测器的故障参数估计值变化率,确保复合故障参数估计值均收敛到故障真值;确定故障诊断阈值,并通过比较故障估计值与故障阈值判断是否发生故障,得到故障诊断结果;
29、飞行控制器单元,用于依据故障诊断结果,判断是否对控制律进行补偿,并在补偿时对补偿系数进行限幅处理,得到舵偏指令;
30、执行器传递单元,用于响应飞行控制单元舵的偏指令,输出实际舵偏角。
31、一种计算机可读存储介质,所述的计算机可读存储介质存储有计算机程序,所述的计算机程序被处理器执行时实现所述一种飞行器复合故障诊断及控制补偿方法的步骤。
32、一种飞行器复合故障诊断及控制补偿设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述的处理器执行所述的计算机程序时实现所述一种飞行器复合故障诊断及控制补偿方法的步骤。
33、本发明与现有技术相比的优点在于:
34、在多个通道同时构建观测器,通过设计估计函数同时估计复合故障参数,解决了系统因复合故障耦合难以独立估计故障参数的问题;基于已估计参数,设计补偿控制律提高飞行控制性能,此外通过对补偿系数进行限幅处理,解决观测器单元估计过程动态响应造成补偿系数振荡的问题。本发明可在软件中实现,性能稳定,易于工程操作。
技术特征:
1.一种飞行器复合故障诊断及控制补偿方法,其特征在于,包括:
2.根据权利要求1所述的一种飞行器复合故障诊断及控制补偿方法,其特征在于,所述待诊断复合故障的故障形式包括:其中,δa、q分别为副翼、俯仰角速度,δa′、q′为故障后的状态量,λa、η为故障参数。
3.根据权利要求1所述的一种飞行器复合故障诊断及控制补偿方法,其特征在于,仿射非线性形式的包含复合故障的双通道动力学模型包括:
4.根据权利要求1所述的一种飞行器复合故障诊断及控制补偿方法,其特征在于,双通道对应的观测器包括:
5.根据权利要求1所述的一种飞行器复合故障诊断及控制补偿方法,其特征在于,所述故障参数估计值变化率为其中,分别为故障参数估计值的变化率,e1、e2为观测器单元状态误差,g1、g2、h1、h2为俯仰角速率q与副翼偏角δa的系数。
6.根据权利要求1所述的一种飞行器复合故障诊断及控制补偿方法,其特征在于,所述故障诊断阈值为γ1=0.05,γ2=0.01(°/s),其中γ1,γ2分别为故障参数估计值的对应的阈值;当表明副翼出现效能损失故障;当表明俯仰角速度传感器出现偏置故障;为故障参数估计值。
7.根据权利要求1所述的一种飞行器复合故障诊断及控制补偿方法,其特征在于,所述对控制律进行补偿包括:
8.一种飞行器复合故障诊断及控制补偿系统,其特征在于,包括飞行控制器单元、传感器单元、观测器单元、执行器传递单元;
9.一种计算机可读存储介质,所述的计算机可读存储介质存储有计算机程序,其特征在于,所述的计算机程序被处理器执行时实现如权利要求1~权利要求7任一所述方法的步骤。
10.一种飞行器复合故障诊断及控制补偿设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于:所述的处理器执行所述的计算机程序时实现如权利要求1~权利要求7任一所述方法的步骤。
技术总结
一种飞行器复合故障诊断及控制补偿方法及系统,属于飞行控制技术领域。本发明所提供的方法包括:步骤一、确定待诊断复合故障的故障形式,获取包含复合故障的双通道动力学模型;步骤二、改写包含故障的双通道动力学模型为仿射非线性形式,其中故障项为仿射非线性形式中的等效线性输入形式;步骤三、对步骤二中双通道分别构建对应的观测器;步骤四、设计步骤三中双通道观测器故障参数估计值的变化率,确保复合故障参数估计值均能收敛到故障真值;步骤五、依据工程经验给出故障诊断阈值,并通过比较故障估计值与故障阈值判断是否发生故障;步骤六、依据步骤五的故障诊断结果,对控制律进行补偿,并对补偿系数进行限幅处理。
技术研发人员:金帆,周奕雯,余帅先,田野,王蕾
受保护的技术使用者:上海航天控制技术研究所
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!