一种智能跟随车辆的人车相对位置判别方法和装置
本发明实施例涉及智能跟随车辆,尤其涉及一种智能跟随车辆的人车相对位置判别方法和装置。
背景技术:
1、随着科技的不断进步、对智慧生活的不断探索,人们对智能设备自动跟随功能的需求越来越大,智能跟随车辆的使用可以减少人力投入,提高工作效率。
2、在智能跟随车辆对目标进行跟随时,常常会出现操作不够规范或者工作情况下需要脱离工作区域的情况。因此,对人车位置进行判断在智能车辆的跟随过程中十分重要。而且,因为人车距离的不同,对工作区域的划分也是有区别的。现有技术中并没有相关的技术手段,本发明因此而来。
技术实现思路
1、本发明提供一种智能跟随车辆的人车相对位置判别方法和装置,在智能跟随车辆的行进的过程中,根据前后基站的信号可以确定人车的相对位置,当人超出工作区域时停止车辆的跟随,以提高跟随的安全性。
2、第一方面,本发明提供一种智能跟随车辆的人车相对位置判别方法,当智能跟随车辆的电机运行模式为跟随模式时,所述方法包括:
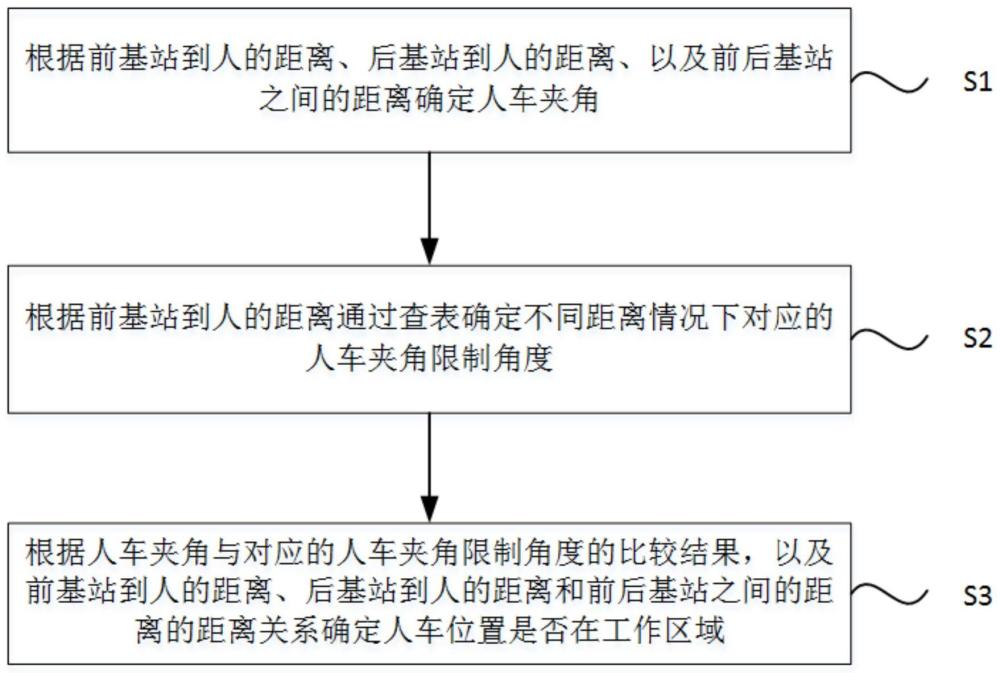
3、s1、根据前基站到人的距离、后基站到人的距离、以及前后基站之间的距离确定人车夹角;
4、s2、根据前基站到人的距离通过查表确定不同距离情况下对应的人车夹角限制角度;
5、s3、根据人车夹角与对应的人车夹角限制角度的比较结果,以及前基站到人的距离、后基站到人的距离和前后基站之间的距离确定人车位置是否在工作区域。
6、可选的,在步骤s3之后还包括:
7、当人车位置从工作区域变化到非工作区域或者从非工作区域变化到工作区域时,初始化并对人车位置连续在工作区域或者连续人在非工作区域的时长进行统计;
8、当人车位置连续在工作区域的统计时长大于工作区域对应的标定值,或者人车位置连续在非工作区域的统计时长大于非工作区域对应的标定值时,则判断人车位置在工作区域发生变化。可选的,所述人车夹角的计算公式为:
9、manposdet_angelval_mp=(com_cmuwb1dst^2+manposdet_cmdifuwb1to2_c^2-com
10、_cmuwb2dst^2)/2/com_cmuwb1dst/manposdet_cmdifuwb1to2_c;
11、其中,manposdet_angelval_mp为人车夹角,com_cmuwb1dst为前基站到人的距离,manposdet_cmdifuwb1to2_c为前后基站之间的距离,com_cmuwb2dst为后基站到人的距离。
12、可选的,所述s2包括:
13、将前基站到人的距离与标定距离进行比较,确定人车夹角对应的限制等级;
14、通过查表,根据当前的限制等级确定人车距离对应的人车夹角限制角度。
15、可选的,所述s3包括:
16、当人车夹角小于对应的人车夹角限制角度,并且manposdet_difoffbasstatdisdata_c>manposdet_bmanposcal_mp>manposdet_difonbasstatdisdata_c时,则判断人车位置在工作区域;
17、否则,则判断人车位置不在工作区域;
18、其中:
19、manposdet_bmanposcal_mp=com_cmuwb2dst^2-com_cmuwb1dst^2-manposdet_cm
20、difuwb1to2_c^2;
21、com_cmuwb1dst为前基站到人的距离,manposdet_cmdifuwb1to2_c为前后基站之间的距离,com_cmuwb2dst为后基站到人的距离,manposdet_difonbasstatdisdata_c和manposdet_difoffbasstatdisdata_c为标定量。
22、第二方面,本发明提供一种智能跟随车辆的人车相对位置判别装置,包括:
23、人车夹角计算模块,用于根据前基站到人的距离、后基站到人的距离、以及前后基站之间的距离确定人车夹角;
24、限制角度确定模块,用于根据前基站到人的距离通过查表确定不同距离情况下对应的人车夹角限制角度;
25、工作区域判断模块,用于根据人车夹角与对应的人车夹角限制角度的比较结果,以及前基站到人的距离、后基站到人的距离和前后基站之间的距离确定人车位置是否在工作区域。
26、本发明通过根据前基站到人的距离、后基站到人的距离、以及前后基站之间的距离确定人车夹角,然后通过查表确定不同前基站到人的距离下对应的人车夹角限制角度,根据人车夹角与对应的人车夹角限制角度的比较结果,以及前基站到人的距离、后基站到人的距离和前后基站之间的距离确定人车位置是否在工作区域,当检测到人超出工作区域时停止车辆的跟随,以提高车辆跟随的安全性。
技术特征:
1.一种智能跟随车辆的人车相对位置判别方法,其特征在于,当智能跟随车辆的电机运行模式为跟随模式时,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,在步骤s3之后还包括:
3.根据权利要求1所述的方法,其特征在于,所述人车夹角的计算公式为:
4.根据权利要求1所述的方法,其特征在于,所述s2包括:
5.根据权利要求1所述的方法,其特征在于,所述s3包括:
6.一种智能跟随车辆的人车相对位置判别装置,其特征在于,包括:
技术总结
本发明公开了一种智能跟随车辆的人车相对位置判别方法和装置。其中,该方法包括:根据前基站到人的距离、后基站到人的距离、以及前后基站之间的距离确定人车夹角;根据前基站到人的距离通过查表确定不同距离情况下对应的人车夹角限制角度;根据人车夹角与对应的人车夹角限制角度的比较结果,以及前基站到人的距离、后基站到人的距离和前后基站之间的距离确定人车位置是否在工作区域。本发明根据前后基站的信号可以确定人车的相对位置,当人超出工作区域时停止车辆的跟随,以提高跟随的安全性。
技术研发人员:江涛,迟达
受保护的技术使用者:清华大学苏州汽车研究院(吴江)
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!