一种冲突预判的多穿梭车路径规划方法与流程
本发明涉及穿梭车路径规划,具体是涉及一种冲突预判的多穿梭车路径规划方法。
背景技术:
1、随着物流仓储行业的高速发展,仓储自动化立体库的需求越来越多,企业物流订单增多,对仓库出货效率要求较高,所以同层货架参与工作的穿梭车数量也会增加,但多台穿梭车执行任务就有可能出现路径冲突死胡同问题,现有的技术方案基本是边走边看出现车再进行避障并且需要依靠穿梭车自身的避障设备,在仓储立体库导轨运行的情况下,会出现穿梭车在一个巷道内,出口一直有其他车路径堵住出口,造成货架地图存在死胡同场景,造成路径堵死。还会出现拥堵点车辆过多,导致无避让路径,或多走回头路。
技术实现思路
1、发明目的:针对以上缺点,本发明提供一种进行冲突预判并解决冲突的多穿梭车路径规划方法。
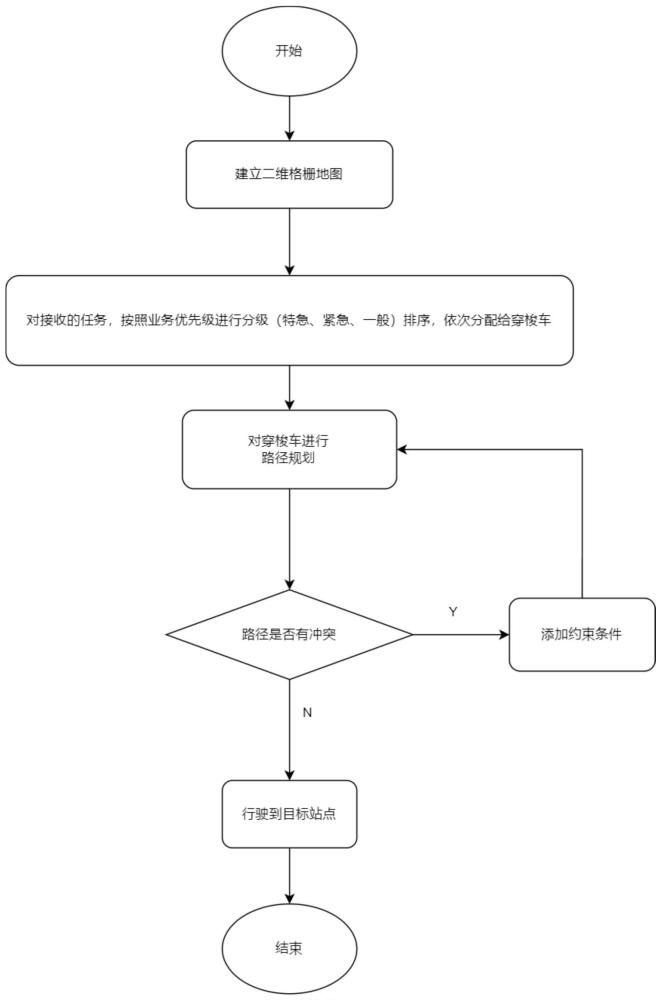
2、技术方案:为解决上述问题,本发明采用一种冲突预判的多穿梭车路径规划方法,包括以下步骤:
3、(1)建立栅格地图,获取穿梭车位置信息;
4、(2)根据任务优先级顺序分配对应穿梭车;
5、(3)接收任务的穿梭车进行路径规划;
6、(4)根据各穿梭车的规划路径以及未接收任务的穿梭车位置信息,确定规划路径或静态位置与第一穿梭车的规划路径存在冲突的第二穿梭车,判断第一穿梭车和第二穿梭车的冲突类型;
7、(5)基于冲突类型分别向第一穿梭车和第二穿梭车发送解决冲突的对应运行指令作为冲突约束条件;
8、(6)穿梭车根据规划路径及冲突约束条件行使至目标终点。
9、进一步的,所述穿梭车行驶区域包括若干路径单元,路径单元之间通过节点连接,每个路径单元两侧均包括若干货位,同一路径单元同侧的相邻货位之间没有穿梭车通过路径,货位与路径单元均为栅格地图的格点;穿梭车根据任务到达对应货位执行任务。
10、进一步的,所述穿梭车尺寸大于、等于或小于单个货位尺寸,当穿梭车尺寸大于货位尺寸时,穿梭车静态位置包括穿梭车位于的货位的格点坐标和该货位相邻两个货位的格点坐标。
11、进一步的,所述冲突类型包括动态冲突和静态冲突,所述动态冲突为第一穿梭车的规划路径与第二穿梭车的规划路径存在冲突点,所述静态冲突为静态的第二穿梭车位于第一穿梭车的规划路径上。
12、进一步的,所述步骤(5)中基于冲突类型分别向第一穿梭车和第二穿梭车发送解决冲突的对应运行指令包括:
13、当确定第一穿梭车和第二穿梭车的冲突类型为静态冲突时,以第一穿梭车的规划路径的格点为屏蔽点集合,作为第二穿梭车的路径规划的约束条件,对第二穿梭车进行路径规划,并根据规划的路径向第二穿梭车发送运行指令。
14、进一步的,所述动态冲突中的冲突点位置包括位于第一穿梭车或第二穿梭车的规划路径的终点,或位于第一穿梭车和第二穿梭车的规划路径的中间点。
15、进一步的,所述步骤(5)中基于冲突类型分别向第一穿梭车和第二穿梭车发送解决冲突的对应运行指令包括:
16、当确定第一穿梭车和第二穿梭车的冲突类型为动态冲突,且冲突点位置位于第一穿梭车或第二穿梭车的规划路径的终点时,对规划路径的终点为冲突点的穿梭车发送指令,控制该穿梭车在到达规划路径终点的前一格点停下,直至另一个穿梭车运行通过冲突点,再控制该穿梭车到达规划路径的终点。
17、进一步的,所述步骤(5)中基于冲突类型分别向第一穿梭车和第二穿梭车发送解决冲突的对应运行指令包括:
18、当确定第一穿梭车和第二穿梭车的冲突类型为动态冲突,且冲突点位置位于第一穿梭车和第二穿梭车的规划路径的中间点时,对规划路径中到冲突点运行路径较长的穿梭车发送指令,控制该穿梭车在到达冲突点的前一格点停下,直至另一个穿梭车运行通过冲突点,再控制该穿梭车到达规划路径的终点。
19、进一步的,所述步骤(2)中按照任务优先级进行任务起点排序,依据穿梭车坐标与任务起点排序利用笛卡尔积算法对接收到的任务计算最优任务分配给穿梭车,任务优先级包括特急、紧急、一般。
20、有益效果:本发明相对于现有技术,其显著优点是对单个穿梭车进行路径规划,将规划后的穿梭车路径放入到路径集合中,对各个穿梭车之间路径进行冲突预判并解决冲突,可以有效解决传统多穿梭车多台穿梭车同层执行任务的路径出现冲突点产生死胡同、碰撞(即在车比货位大的情况下,两车距离过近而引起的碰撞)问题。
技术特征:
1.一种冲突预判的多穿梭车路径规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的多穿梭车路径规划方法,其特征在于,所述穿梭车行驶区域包括若干路径单元,路径单元之间通过节点连接,每个路径单元两侧均包括若干货位,同一路径单元同侧的相邻货位之间没有穿梭车通过路径,货位与路径单元均为栅格地图的格点;穿梭车根据任务到达对应货位执行任务。
3.根据权利要求2所述的多穿梭车路径规划方法,其特征在于,所述穿梭车尺寸包括大于、等于或小于单个货位尺寸,当穿梭车尺寸大于货位尺寸时,穿梭车静态位置包括穿梭车位于的货位的格点坐标和该货位相邻两个货位的格点坐标。
4.根据权利要求1或3所述的多穿梭车路径规划方法,其特征在于,所述冲突类型包括动态冲突和静态冲突,所述动态冲突为第一穿梭车的规划路径与第二穿梭车的规划路径存在冲突点,所述静态冲突为静态的第二穿梭车位于第一穿梭车的规划路径上。
5.根据权利要求4所述的多穿梭车路径规划方法,其特征在于,所述步骤(5)中基于冲突类型分别向第一穿梭车和第二穿梭车发送解决冲突的对应运行指令包括:
6.根据权利要求4所述的多穿梭车路径规划方法,其特征在于,所述动态冲突中的冲突点位置包括位于第一穿梭车或第二穿梭车的规划路径的终点,或位于第一穿梭车和第二穿梭车的规划路径的中间点。
7.根据权利要求6所述的多穿梭车路径规划方法,其特征在于,所述步骤(5)中基于冲突类型分别向第一穿梭车和第二穿梭车发送解决冲突的对应运行指令包括:
8.根据权利要求6所述的多穿梭车路径规划方法,其特征在于,所述步骤(5)中基于冲突类型分别向第一穿梭车和第二穿梭车发送解决冲突的对应运行指令包括:
9.根据权利要求1所述的多穿梭车路径规划方法,其特征在于,所述步骤(2)中按照任务优先级进行任务起点排序,依据穿梭车坐标与任务起点排序利用笛卡尔积算法对接收到的任务计算最优任务分配给穿梭车,任务优先级包括特急、紧急、一般。
10.根据权利要求1所述的多穿梭车路径规划方法,其特征在于,所述步骤(3)中采用cbs算法对穿梭车进行路径规划。
技术总结
本发明公开了一种冲突预判的多穿梭车路径规划方法,首先建立栅格地图,获取穿梭车位置信息;根据任务优先级顺序分配对应穿梭车并进行路径规划;根据各穿梭车的规划路径以及穿梭车位置信息,确定规划路径或静态位置与第一穿梭车的规划路径存在冲突的第二穿梭车,判断第一穿梭车和第二穿梭车的冲突类型;基于冲突类型分别向第一穿梭车和第二穿梭车发送解决冲突的对应运行指令作为冲突约束条件;穿梭车根据规划路径及冲突约束条件行使至目标终点。对单个穿梭车进行路径规划,将规划后的穿梭车路径放入到路径集合中,对各个穿梭车之间路径进行冲突预判并解决冲突,可以有效解决传统多穿梭车多台穿梭车同层执行任务的路径出现冲突点产生死胡同问题。
技术研发人员:金跃跃,王彪,欧阳子曦,谢明
受保护的技术使用者:南京音飞储存设备(集团)股份有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!