飞行汽车的协同控制系统及其控制方法
本申请涉及车辆,特别涉及一种飞行汽车的协同控制系统及其控制方法。
背景技术:
1、当前,大部分车辆都采用了三段式结构,包含飞行动力单元、载人单元和底盘单元,通常情况下,飞行动力单元位于载人单元顶部,而底盘单元负责在地面上行驶。
2、然而,无论是旋翼、固定翼还是复合翼结构,飞行单元的体积都会对汽车的驾驶产生不利影响,亟待解决。
技术实现思路
1、本申请提供一种飞行汽车的协同控制系统及其控制方法,以解决飞行汽车中飞行器对汽车驾驶的干扰问题,通过自动协同控制飞行单元,减少飞行器对驾驶的干扰,优化驾驶体验。
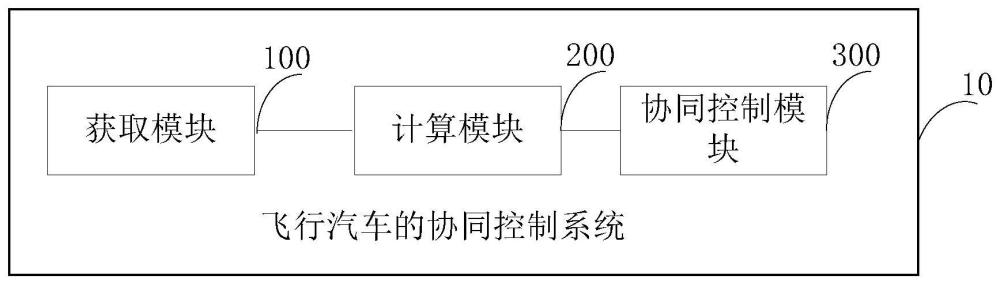
2、本申请第一方面实施例提供一种飞行汽车的协同控制系统,包括:
3、获取模块,用于获取当前飞行汽车的外部环境感知信息、驾驶行为感知信息和车身姿态感知信息;
4、计算模块,用于根据所述外部环境感知信息、所述驾驶行为感知信息和所述车身姿态感知信息计算与所述当前飞行汽车对应的飞行器对所述当前飞行汽车的动力学影响参数,并根据所述动力学影响参数确定所述飞行器的协同控制数据;以及
5、协同控制模块,用于根据所述协同控制数据对所述飞行器的至少一个协同控制单元进行协同控制。
6、可选地,在一些实施例中,所述计算模块,包括:
7、模型建立单元,用于基于所述外部环境感知信息、所述驾驶行为感知信息和所述车身姿态感知信息建立所述当前飞行汽车的动力学模型;
8、预测单元,用于根据所述动力学模型预测所述当前飞行汽车下一时刻的状态信息;
9、计算单元,用于根据所述动力学模型和下一时刻的状态信息计算所述当前飞行汽车对应的飞行器对所述当前飞行汽车的动力学影响参数;
10、确定单元,用于基于预设的反馈控制策略,根据所述动力学影响参数确定所述协同控制数据。
11、可选地,在一些实施例中,所述获取模块,包括:
12、外部环境获取单元,用于获取当前飞行汽车的所处环境的气流信息、道路路面信息和交通环境信息,根据所述气流信息、所述道路路面信息和所述交通环境信息得到所述外部环境感知信息;
13、驾驶行为获取单元,用于获取当前飞行汽车的加速度信息和转向信息,并根据所述加速度信息和所述转向信息得到驾驶行为感知信息;
14、车身姿态获取单元,用于获取当前飞行汽车的车身倾斜信息,并根据所述车身倾斜信息得到所述车身姿态感知信息。
15、可选地,在一些实施例中,所述协同控制模块,包括:
16、生成单元,用于根据所述协同控制数据生成协同控制策略;
17、控制单元,用于基于所述协同控制策略对所述飞行器的至少一个协同控制单元进行协同控制。
18、可选地,在一些实施例中,所述协同控制单元包括:旋翼、固定翼、尾翼、机身中的至少一种。
19、本申请第二方面实施例提供一种飞行汽车的协同控制方法,包括以下步骤:
20、获取当前飞行汽车的外部环境感知信息、驾驶行为感知信息和车身姿态感知信息;
21、根据所述外部环境感知信息、所述驾驶行为感知信息和所述车身姿态感知信息计算与所述当前飞行汽车对应的飞行器对所述当前飞行汽车的动力学影响参数,并根据所述动力学影响参数确定所述飞行器的协同控制数据;以及
22、根据所述协同控制数据对所述飞行器的至少一个协同控制单元进行协同控制。
23、可选地,在一些实施例中,所述获取当前飞行汽车的外部环境感知信息、驾驶行为感知信息和车身姿态感知信息,包括:
24、获取当前飞行汽车的所处环境的气流信息、道路路面信息和交通环境信息,根据所述气流信息、所述道路路面信息和所述交通环境信息得到所述外部环境感知信息;
25、获取当前飞行汽车的加速度信息和转向信息,并根据所述加速度信息和所述转向信息得到驾驶行为感知信息;
26、获取当前飞行汽车的车身倾斜信息,并根据所述车身倾斜信息得到所述车身姿态感知信息。
27、可选地,在一些实施例中,所述根据所述协同控制数据对所述飞行器的至少一个协同控制单元进行协同控制,包括:
28、根据所述协同控制数据生成协同控制策略,基于所述协同控制策略对所述飞行器的至少一个协同控制单元进行协同控制。
29、本申请第三方面实施例提供一种飞行汽车,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的飞行汽车的协同控制方法。
30、本申请第四方面实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的飞行汽车的协同控制方法。
31、由此,通过获取当前飞行汽车的外部环境感知信息、驾驶行为感知信息和车身姿态感知信息,根据外部环境感知信息、驾驶行为感知信息和车身姿态感知信息计算与当前飞行汽车对应的飞行器对当前飞行汽车的动力学影响参数,并根据动力学影响参数确定飞行器的协同控制数据,并根据协同控制数据对飞行器的至少一个协同控制单元进行协同控制。由此,解决飞行汽车中飞行器对汽车驾驶的干扰问题,通过自动协同控制飞行单元,减少飞行器对驾驶的干扰,优化驾驶体验。
32、本申请附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:
1.一种飞行汽车的协同控制系统,其特征在于,包括:
2.根据权利要求1所述的系统,其特征在于,所述计算模块,包括:
3.根据权利要求1所述的系统,其特征在于,所述获取模块,包括:
4.根据权利要求1所述的系统,其特征在于,所述协同控制模块,包括:
5.根据权利要求1所述的系统,其特征在于,所述协同控制单元包括:旋翼、固定翼、尾翼、机身中的至少一种。
6.一种飞行汽车的协同控制方法,其特征在于,利用如权利要求1-5任一项所述的飞行汽车的协同控制系统,所述方法包括以下步骤:
7.根据权利要求6所述的方法,其特征在于,所述获取当前飞行汽车的外部环境感知信息、驾驶行为感知信息和车身姿态感知信息,包括:
8.根据权利要求6所述的方法,其特征在于,所述根据所述协同控制数据对所述飞行器的至少一个协同控制单元进行协同控制,包括:
9.一种飞行汽车,其特征在于,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如权利要求6-8任一项所述的飞行汽车的协同控制方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行,以用于实现如权利要求6-8任一项所述的飞行汽车的协同控制方法。
技术总结
本申请涉及车辆技术领域,特别涉及一种飞行汽车的协同控制系统及其控制方法,其中,方法包括:获取模块,用于获取当前飞行汽车的外部环境感知信息、驾驶行为感知信息和车身姿态感知信息;计算模块,用于根据外部环境感知信息、驾驶行为感知信息和车身姿态感知信息计算与当前飞行汽车对应的飞行器对当前飞行汽车的动力学影响参数,并根据动力学影响参数确定飞行器的协同控制数据;以及协同控制模块,用于根据协同控制数据对飞行器的至少一个协同控制单元进行协同控制。由此,解决飞行汽车中飞行器对汽车驾驶的干扰问题,通过自动协同控制飞行单元,减少飞行器对驾驶的干扰,优化驾驶体验。
技术研发人员:曲小波,王亮,王春霖,王凯
受保护的技术使用者:清华大学
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!