一种智能医用气体控制系统的制作方法
本技术涉及医疗器械,具体为一种智能医用气体控制系统。
背景技术:
1、医疗器械是指直接或者间接用于人体的仪器、设备、器具、体外诊断试剂及校准物、材料以及其他类似或者相关的物品,医疗器械包括医疗设备和医用耗材,医用气体系统在医院工程建设中是不可或缺的重要组成部分,用于维系危重患者的生命,减少患者痛苦,促进患者康复,改善环境等在医院手术过程中需要使用医用气体系统对患者提供氧气。
2、但有些医院的医用气体系统使用时,通常使用人工监视,但人工无法时时刻刻对相关器械或设施进行监控,同时医院内的专业医疗设备通常由专人管理,但手术环境工作量大,管理人员若稍不注意,就增加手术风险,对此有必要提出一种智能医用气体控制系统。
技术实现思路
1、本实用新型的目的在于提供一种智能医用气体控制系统,以解决上述背景技术中提出的问题。
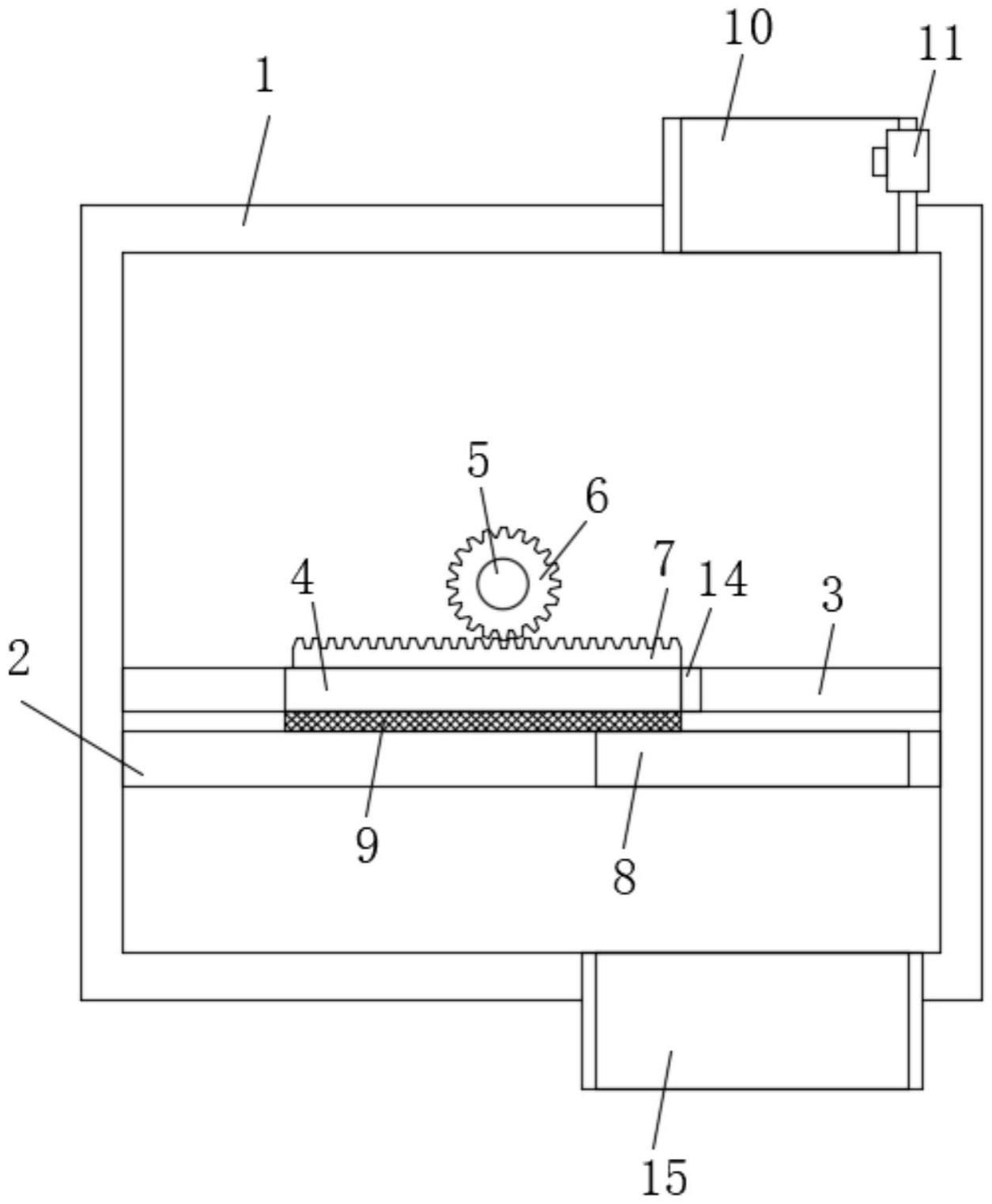
2、为实现上述目的,本实用新型提供如下技术方案:一种智能医用气体控制系统,包括控制箱,所述控制箱的左右两侧内壁共同固定连接有一个密封板,所述控制箱的上下两端内壁位于密封板的一侧均贯穿开设有一个滑槽,两个所述滑槽的内壁共同滑动连接有一个遮蔽块,所述控制箱的上下两端内壁位于遮蔽块的一侧共同转动连接有一根转动杆;
3、所述转动杆的外壁固定套接有一个齿轮,所述遮蔽块的外壁相对于齿轮的位置固定连接有一个齿条,且所述齿条与齿轮相啮合,所述密封板的外壁贯穿开设有一个透气孔,所述遮蔽块靠近密封板的一端外壁固定连接有一个密封块,且所述密封块与密封板相抵;
4、所述控制箱的一端内壁固定连接有一根供气管,且所述供气管的一端贯穿延伸至对应的控制箱外并固定连接有一个压力传感器,且所述压力传感器的一端贯穿延伸至供气管外。
5、优选的,所述控制箱的外壁相对于转动杆的位置固定连接有一个安装架,所述安装架的内壁固定连接有一个驱动电机,且所述转动杆的一端通过轴承贯穿延伸至控制箱外并通过联轴器与驱动电机固定相连。
6、优选的,所述遮蔽块位于滑槽内的一端外壁均固定连接有一个挡块。
7、优选的,所述控制箱远离供气管的一端内壁固定连接有一个入气管,且所述入气管贯穿延伸至控制箱外。
8、优选的,所述入气管与透气孔的孔径相同并大于供气管的孔径。
9、与现有技术相比,本实用新型的有益效果是:气体通过入气管进入控制箱内,气体通过透气孔进入供气管内,压力传感器对供气管内的气压进行检测,当气压较大时,启动驱动电机带动转动杆与齿轮转动,齿轮带动齿条与遮蔽块向一端移动,遮蔽块在滑槽内移动并增加透气孔的面积,增加进入供气管内的气体,增加供气管内的气压,反之减少供气管内的气压,通过传感器对气压进行快速调节,避免人工监视造成的疏忽,减少工作人员的工作量。
技术特征:
1.一种智能医用气体控制系统,包括控制箱(1),其特征在于,所述控制箱(1)的左右两侧内壁共同固定连接有一个密封板(2),所述控制箱(1)的上下两端内壁位于密封板(2)的一侧均贯穿开设有一个滑槽(3),两个所述滑槽(3)的内壁共同滑动连接有一个遮蔽块(4),所述控制箱(1)的上下两端内壁位于遮蔽块(4)的一侧共同转动连接有一根转动杆(5);
2.根据权利要求1所述的一种智能医用气体控制系统,其特征在于:所述控制箱(1)的外壁相对于转动杆(5)的位置固定连接有一个安装架(12),所述安装架(12)的内壁固定连接有一个驱动电机(13),且所述转动杆(5)的一端通过轴承贯穿延伸至控制箱(1)外并通过联轴器与驱动电机(13)固定相连。
3.根据权利要求1所述的一种智能医用气体控制系统,其特征在于:所述遮蔽块(4)位于滑槽(3)内的一端外壁均固定连接有一个挡块(14)。
4.根据权利要求1所述的一种智能医用气体控制系统,其特征在于:所述控制箱(1)远离供气管(10)的一端内壁固定连接有一个入气管(15),且所述入气管(15)贯穿延伸至控制箱(1)外。
5.根据权利要求4所述的一种智能医用气体控制系统,其特征在于:所述入气管(15)与透气孔(8)的孔径相同并大于供气管(10)的孔径。
技术总结
本技术公开了一种智能医用气体控制系统,包括控制箱,所述控制箱的左右两侧内壁共同固定连接有一个密封板,所述控制箱的上下两端内壁位于密封板的一侧均贯穿开设有一个滑槽,两个所述滑槽的内壁共同滑动连接有一个遮蔽块,本实用有益效果是:气体通过入气管进入控制箱内,气体通过透气孔进入供气管内,压力传感器对供气管内的气压进行检测,当气压较大时,启动驱动电机带动转动杆与齿轮转动,齿轮带动齿条与遮蔽块向一端移动,遮蔽块在滑槽内移动并增加透气孔的面积,增加进入供气管内的气体,增加供气管内的气压,反之减少供气管内的气压,通过传感器对气压进行快速调节,避免人工监视造成的疏忽,减少工作人员的工作量。
技术研发人员:方宪宾,叶太平
受保护的技术使用者:武汉德广仕顺医疗科技有限公司
技术研发日:20230109
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!