一种清洁机器人的嵌入式控制系统的制作方法
本技术涉及智能清洁设备,尤其涉及一种清洁机器人的嵌入式控制系统。
背景技术:
1、清洁机器人是一个将移动机器人和洗拖一体机有机地融合起来的一项新技术,它解放了我们的双手,节省了我们的劳动力,实现了对地面的自主清洁,是一种环保、健康、智能型的服务机器人,具有广阔的应用前景和市场需求。尽管目前市场上已经有了一些产品进入了实用阶段,但是清洁机器人仍然有许多问题有待解决,在工作效率和自主能力方面还有待提高。
2、目前的清洁机器人嵌入式控制系统多为一个算力平台加上一个控制平台的控制架构,无法适应对清洁机器人提出的多传感器融合、多清洁系统组合、人机协作的智能化应用场景。
3、因此,有必要提供一种清洁机器人的嵌入式控制系统解决上述技术问题。
技术实现思路
1、为解决上述技术问题,本实用新型提供一种清洁机器人的嵌入式控制系统。
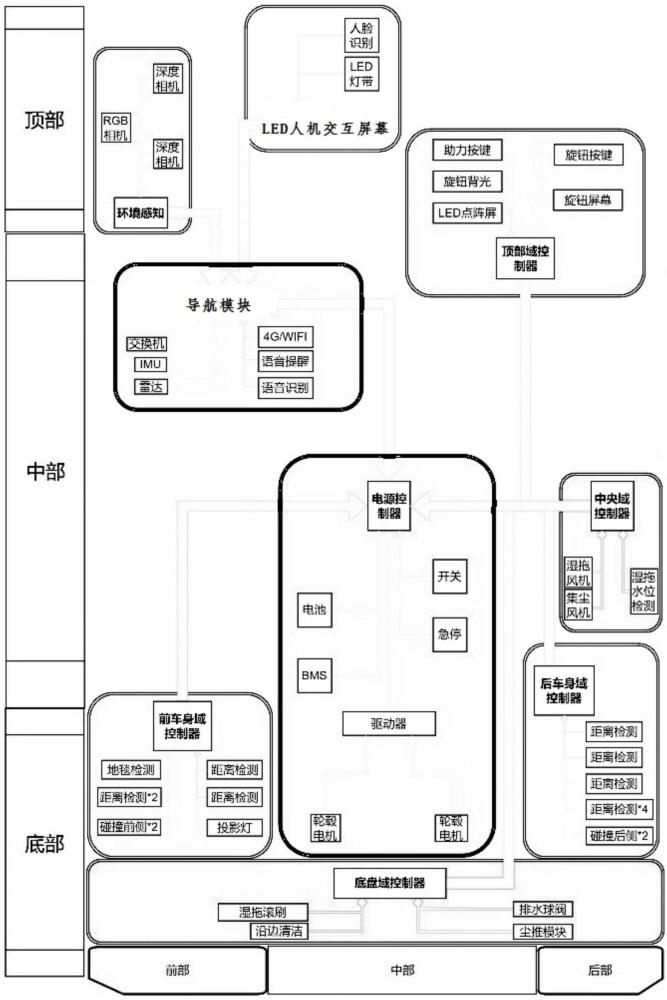
2、本实用新型提供的一种清洁机器人的嵌入式控制系统,包括嵌入式的中央处理器、位置域控制器以及与位置域控制器对应的功能模块,所述功能模块电性连接在对应的位置域控制器的信号输出端,所述位置域控制器电性连接在中央处理器的信号输出端,所述位置域控制器根据中央处理器传输的控制指令控制对应的所述功能模块工作;
3、其中,所述位置域控制器包括分布于清洁机器人前侧的前车身域控制器、分布于清洁机器人后侧的后车身域控制器、分布于清洁机器人底部的底盘域控制器、分布于清洁机器人顶部的顶部域控制器以及分布于清洁机器人中部的中央域控制器。
4、优选的,所述功能模块包括受前车身域控制器控制的地毯检测传感器、前侧距离传感器、右前侧距离传感器、前侧碰撞检测传感器和投影灯。
5、优选的,所述功能模块还包括受后车身域控制器控制的右后侧距离传感器、后侧距离传感器和后侧碰撞检测传感器。
6、优选的,所述功能模块还包括受底盘域控制器控制的滚刷和排水球阀。
7、优选的,所述功能模块还包括受顶部域控制器控制的led交互屏幕。
8、优选的,所述功能模块还包括受中央域控制器控制的湿拖风机、集尘风机和湿拖水位传感器。
9、优选的,所述嵌入式控制系统还包括导航模块;
10、所述导航模块与所述中央处理器电性连接,所述导航模块用于辅助清洁机器人避开障碍物。
11、优选的,所述嵌入式控制系统还包括电源控制器;
12、其中,所述电源控制器与所述中央处理器、所述位置域控制器和所述功能模块电性连接;所述电源控制器用于整机的电源转换。
13、与相关技术相比较,本实用新型提供的一种清洁机器人的嵌入式控制系统具有如下有益效果:
14、本实用新型的控制系统设置有嵌入式的中央处理器、位置域控制器以及与位置域控制器对应的功能模块,同时位置域控制器由分布于清洁机器人前侧的前车身域控制器、后侧的后车身域控制器、底部的底盘域控制器、顶部的顶部域控制器以及中部的中央域控制器组成,本实用新型的系统结构合理、紧凑,可扩展性强,通过位置域控制器实现功能模块内、功能模块间的解耦,优化线束布局,提高各区域响应速率。
技术特征:
1.一种清洁机器人的嵌入式控制系统,其特征在于,包括嵌入式的中央处理器、位置域控制器以及与位置域控制器对应的功能模块,所述功能模块电性连接在对应的位置域控制器的信号输出端,所述位置域控制器电性连接在中央处理器的信号输出端,所述位置域控制器根据中央处理器传输的控制指令控制对应的所述功能模块工作;
2.根据权利要求1所述的一种清洁机器人的嵌入式控制系统,其特征在于,所述功能模块包括受前车身域控制器控制的地毯检测传感器、前侧距离传感器、右前侧距离传感器、前侧碰撞检测传感器和投影灯。
3.根据权利要求1所述的一种清洁机器人的嵌入式控制系统,其特征在于,所述功能模块还包括受后车身域控制器控制的右后侧距离传感器、后侧距离传感器和后侧碰撞检测传感器。
4.根据权利要求1所述的一种清洁机器人的嵌入式控制系统,其特征在于,所述功能模块还包括受底盘域控制器控制的滚刷和排水球阀。
5.根据权利要求1所述的一种清洁机器人的嵌入式控制系统,其特征在于,所述功能模块还包括受顶部域控制器控制的led交互屏幕。
6.根据权利要求1所述的一种清洁机器人的嵌入式控制系统,其特征在于,所述功能模块还包括受中央域控制器控制的湿拖风机、集尘风机和湿拖水位传感器。
7.根据权利要求1所述的一种清洁机器人的嵌入式控制系统,其特征在于,所述嵌入式控制系统还包括导航模块;
8.根据权利要求1至7任意一项所述的一种清洁机器人的嵌入式控制系统,其特征在于,所述嵌入式控制系统还包括电源控制器;
技术总结
本技术提供一种清洁机器人的嵌入式控制系统,包括嵌入式的中央处理器、位置域控制器以及与位置域控制器对应的功能模块,所述功能模块电性连接在对应的位置域控制器的信号输出端,所述位置域控制器电性连接在中央处理器的信号输出端,所述位置域控制器根据中央处理器传输的控制指令控制对应的所述功能模块工作,同时位置域控制器由分布于清洁机器人前侧的前车身域控制器、后侧的后车身域控制器、底部的底盘域控制器、顶部的顶部域控制器以及中部的中央域控制器组成,本技术的系统结构合理、紧凑,可扩展性强,通过位置域控制器实现功能模块内、功能模块间的解耦,优化线束布局,提高各区域响应速率。
技术研发人员:请求不公布姓名,李宇浩
受保护的技术使用者:麦岩智能科技(北京)有限公司
技术研发日:20230317
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!