手柄、控制系统和作业机械的制作方法
本技术涉及控制领域,尤其涉及一种手柄、控制系统和作业机械。
背景技术:
1、随着挖掘机等作业机械的不断发展,越来越多的作业机械的控制系统由电控系统取代了液控系统。电控手柄为电控系统中不可或缺的重要部件,当作业机械出厂后,电控手柄的操作力固定,且不可调节。但是不同的操作手对操作力的使用感受存在差异,对于同一个作业机械,在使用过程中,一部分操作手感觉电控手柄的手感较轻,一部分操作手感觉电控手柄的手感较重,影响客户使用体验。
2、因此,如何解决相关技术中电控手柄的操作力固定且不可调节的问题成为本领域技术人员急需解决的技术问题。
技术实现思路
1、本实用新型提供一种手柄、控制系统和作业机械,用以解决现有技术中电控手柄的操作力固定且不可调节的缺陷,实现手柄的操作力可根据用户习惯进行调整的效果。
2、本实用新型提供一种手柄,包括:
3、壳体;
4、操作杆,所述操作杆与所述壳体通过万向机构转动连接;
5、复位组件,所述复位组件设置在所述操作杆与所述壳体之间,所述复位组件用于驱动所述操作杆回到中位;
6、调节组件,所述调节组件用于调节所述复位组件与所述操作杆之间的作用力的大小;
7、检测组件,所述检测组件设置在所述壳体与所述操作杆之间,所述检测组件用于检测所述操作杆的转动方向以及转动角度。
8、根据本实用新型提供的手柄,所述操作杆包括:
9、杆体;
10、压盘,所述压盘设置在所述杆体的底部,且所述压盘沿所述杆体的径向向外延伸,所述压盘的底部用于与所述复位组件接触。
11、根据本实用新型提供的手柄,所述复位组件包括:
12、顶杆,所述顶杆包括四个,四个所述顶杆可滑动的设置在所述壳体内,且滑动方向与所述壳体的轴向平行,四个所述顶杆的顶端均与所述压盘的底部接触,四个所述顶杆以所述壳体的轴线为中心线间隔九十度设置;
13、弹性件,所述弹性件设置四个,且四个所述弹性件一一对应的设置在四个所述顶杆的底部与所述调节组件的顶部之间。
14、根据本实用新型提供的手柄,所述调节组件包括:
15、移动座,所述移动座的边缘与所述壳体的内壁可移动连接,所述弹性件设置在所述移动座的顶部与所述顶杆的底部之间;
16、直线伸缩机构,所述直线伸缩机构设置在所述壳体与所述移动座之间,所述直线伸缩机构用于驱动所述移动座沿所述壳体的轴向运动。
17、根据本实用新型提供的手柄,所述直线伸缩机构包括螺杆、驱动组件和设置在所述移动座上的螺纹孔,所述螺杆与所述壳体的底部转动连接,所述螺杆与所述移动座通过所述螺纹孔连接,所述驱动组件与所述壳体连接,且所述驱动组件用于驱动所述螺杆转动。
18、根据本实用新型提供的手柄,所述驱动组件包括电机和传动件,所述电机通过所述传动件与所述螺杆传动连接。
19、根据本实用新型提供的手柄,所述检测组件包括拨杆和霍尔传感器,所述拨杆与所述操作杆同步转动,所述霍尔传感器设置在所述拨杆与所述壳体之间。
20、根据本实用新型提供的手柄,所述万向机构包括十字轴。
21、本实用新型还提供一种控制系统,包括如上所述的手柄。
22、本实用新型还提供一种作业机械,包括如上所述的手柄或如上所述的控制系统。
23、本实用新型提供的手柄,包括壳体、操作杆、复位组件、调节组件和检测组件。操作杆设置在壳体的顶部,且与壳体之间通过万向机构转动连接,如此,操作杆的顶部至少可向前、后、左、右四个方向转动,由此使作业机械做出相应的动作。复位组件设置在操作杆的底部与壳体之间,复位组件为操作杆提供使操作杆回归中位的力,当操作手向某一方向扳动操作杆时,复位组件的受力失衡,当操作手释放操作杆时,复位组件重新回到平衡状态,在回归平衡状态的过程驱动操作杆回到中位,当操作杆位于中位时,作业机械不执行任何动作。调节组件用于调节复位组件与操作杆之间的作用力的大小,操作手在扳动操作杆时,需要克服复位组件与操作杆之间的作用力后才可扳动操作杆,如此,可以改变操作杆的操作手感的轻重,操作手可根据操作习惯适应性的调整操作杆的手感的轻重。检测组件用于检测操作杆的转动方向以及转动角度,用于控制作业机械根据操作杆的转动方向和转动角度执行相应的动作。
24、进一步地,在本实用新型提供的控制系统和作业机械中,均设置有如上所述的手柄,因此均具有与如上所述相同的优势。
技术特征:
1.一种手柄,其特征在于,包括:
2.根据权利要求1所述的手柄,其特征在于,所述操作杆包括:
3.根据权利要求2所述的手柄,其特征在于,所述复位组件包括:
4.根据权利要求3所述的手柄,其特征在于,所述调节组件包括:
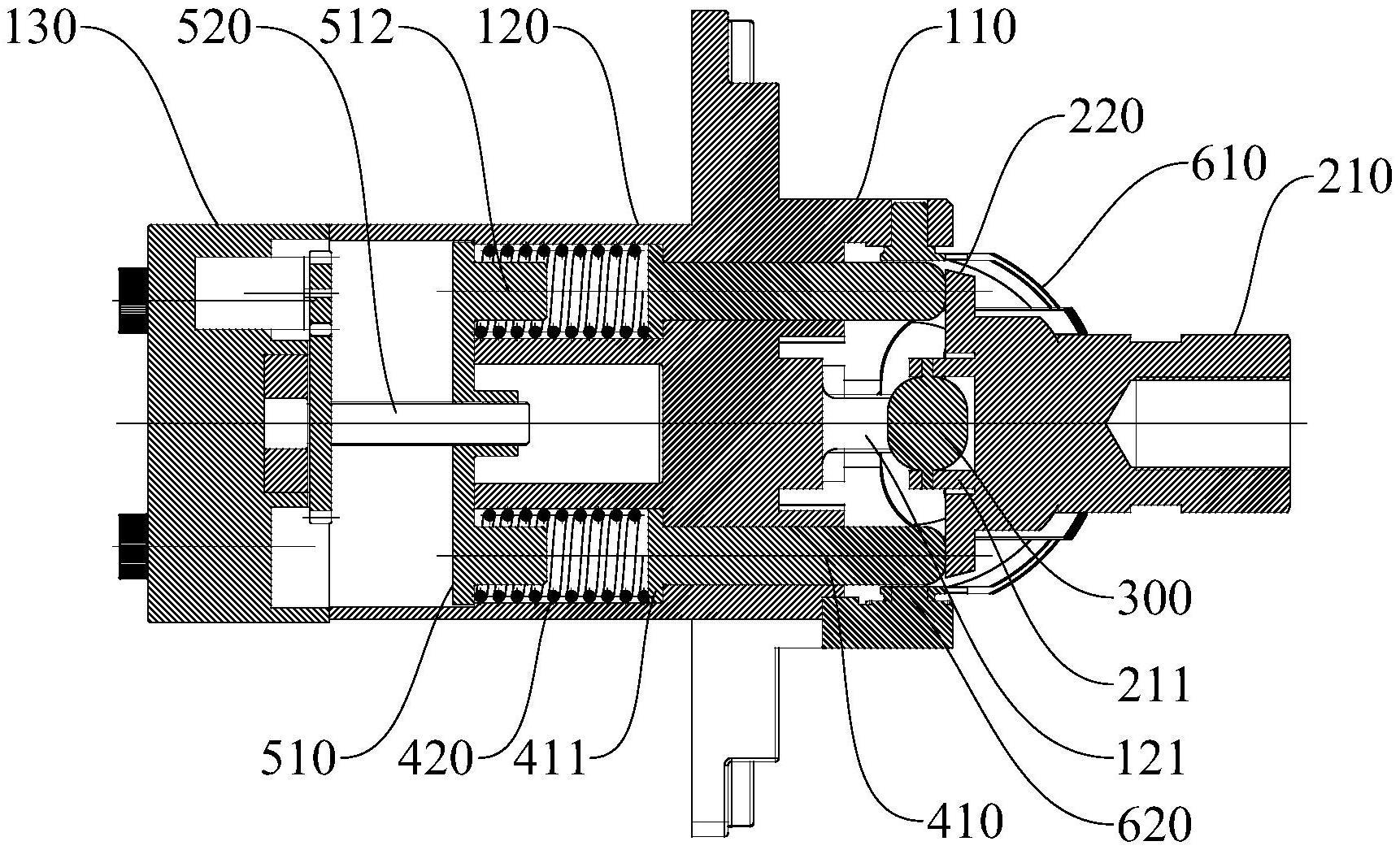
5.根据权利要求4所述的手柄,其特征在于,所述直线伸缩机构包括螺杆(520)、驱动组件和设置在所述移动座(510)上的螺纹孔(513),所述螺杆(520)与所述壳体的底部转动连接,所述螺杆(520)与所述移动座(510)通过所述螺纹孔(513)连接,所述驱动组件与所述壳体连接,且所述驱动组件用于驱动所述螺杆(520)转动。
6.根据权利要求5所述的手柄,其特征在于,所述驱动组件包括电机和传动件,所述电机通过所述传动件与所述螺杆传动连接。
7.根据权利要求1~6任一项所述的手柄,其特征在于,所述检测组件包括拨杆(610)和霍尔传感器(620),所述拨杆(610)与所述操作杆同步转动,所述霍尔传感器(620)设置在所述拨杆(610)与所述壳体之间。
8.根据权利要求1所述的手柄,其特征在于,所述万向机构包括十字轴(300)。
9.一种控制系统,其特征在于,包括如权利要求1~8任一项所述的手柄。
10.一种作业机械,其特征在于,包括如权利要求1~8任一项所述的手柄或如权利要求9所述的控制系统。
技术总结
本技术涉及控制领域,提供一种手柄、控制系统和作业机械,包括壳体、操作杆、复位组件和调节组件。操作杆与壳体通过万向机构转动连接,使操作杆的顶部至少可向前、后、左、右四个方向转动。复位组件设置在操作杆与壳体之间,用于为操作杆提供使操作杆回归中位的力,当向某一方向扳动操作杆时,复位组件的受力失衡,当操作手释放操作杆时,复位组件将操作杆推回中位。调节组件设置在复位组件与壳体之间,调节组件可以调节复位组件与操作杆之间的作用力的大小,操作手在扳动操作杆时,需要克服复位组件与操作杆之间的作用力后才可扳动操作杆,如此,可以改变操作杆的操作手感的轻重,操作手可根据操作习惯适应性的调整操作杆的手感的轻重。
技术研发人员:李文尚,李达辉,张保立
受保护的技术使用者:上海三一重机股份有限公司
技术研发日:20230418
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!