一种电动工具状态识别电路的制作方法
本技术涉及电学领域,更具体地,涉及一种电动工具状态识别电路。
背景技术:
1、现有的电动工具(例如:手枪钻,电锤,角磨机等)使用时会发生危险状况,使用者无法快捷辨认工具的使用状态,存在较大的安全隐患,因此,如何满足使用者快速识别电动工具状态是本领域技术人员亟待解决的。
2、有鉴于此,本实用新型提供一种能够精确识别电动工具状态、高安全性、电路结构简单的,一种电动工具状态识别电路。
技术实现思路
1、本实用新型的目的在于,提供一种能够精确识别电动工具状态、高安全性、电路结构简单的,一种电动工具状态识别电路。
2、一种电动工具状态识别电路,其特征在于,包括:陀螺仪传感器、电源及通信接口、程序烧录接口、mcu电路,其特征在于:陀螺仪传感器与mcu电路双向连接,mcu电路与电源及通信接口的通信端双向连接,电源及通信接口的电源端与陀螺仪传感器、mcu电路连接,电源及通信接口用于为陀螺仪传感器、mcu电路、程序烧录接口供电与将mcu输出的信号输送至外接主板,程序烧录接口与mcu电路双向连接,程序烧录接口用于烧录或/和读取mcu芯片u2内的控制程序并支持在线调试。
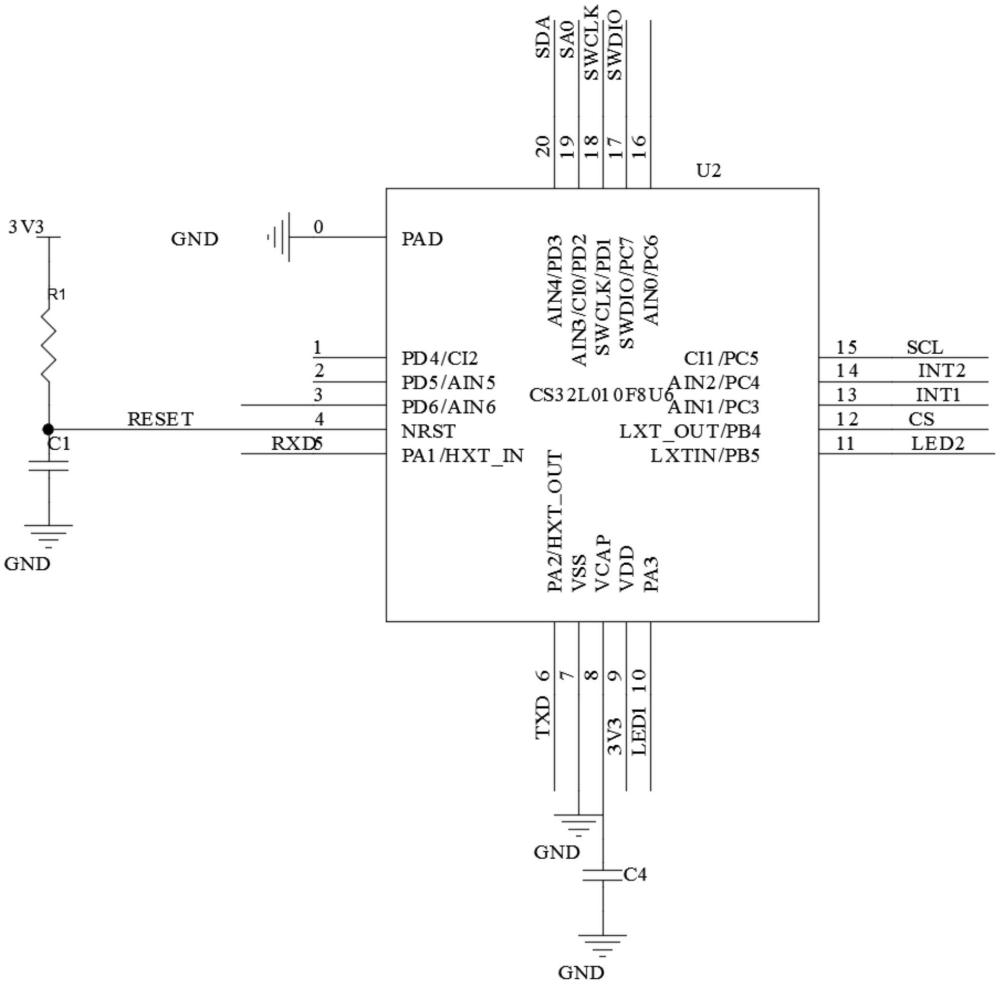
3、在一些实施方式中,所述陀螺仪传感器u1的1脚与mcu芯片u2的19脚连接,所述陀螺仪传感器u1的14脚与mcu芯片u2的20脚连接,所述陀螺仪传感器u1的13脚与mcu芯片u2的15脚连接,所述陀螺仪传感器u1的12脚与mcu芯片u2的12脚连接,所述陀螺仪传感器u1的1脚、14脚、13脚、12脚均用于输出陀螺仪传感器u1数据信号,所述mcu芯片u2的19脚、20脚、15脚、12脚用于承接陀螺仪传感器u1输出的数据信号。
4、该电动工具为手枪钻时,当陀螺仪传感器u1获取的正面轴(z轴)的角速度的绝对值超过580°时,陀螺仪传感器u1通过1脚、14脚、13脚、12脚输出数据信号给mcu芯片u2的19脚、20脚、15脚、12脚,mcu芯片u2接受数据后通过输出端输出停止工作信号至电源及通信接口控制手枪钻的电机停止旋转;
5、当陀螺仪传感器u1获取的x轴(平面轴)、y轴(平面轴)的角速度的模值的平方值大于360000时,陀螺仪传感器u1通过1脚、14脚、13脚、12脚输出数据信号给mcu芯片u2的19脚、20脚、15脚、12脚,mcu芯片u2接受数据后通过输出端输出停止工作信号至电源及通信接口控制手枪钻的电机停止旋转;
6、该电动工具为电锤时,当陀螺仪传感器u1获取的正面轴(z轴)的角速度的绝对值超过700°时,陀螺仪传感器u1通过1脚、14脚、13脚、12脚输出数据信号给mcu芯片u2的19脚、20脚、15脚、12脚,mcu芯片u2接受数据后通过输出端输出停止工作信号至电源及通信接口控制电锤的电机停止旋转;
7、当陀螺仪传感器u1获取的x轴(平面轴)、y轴(平面轴)的角速度的模值的平方值大于560000,陀螺仪传感器u1通过1脚、14脚、13脚、12脚输出数据信号给mcu芯片u2的19脚、20脚、15脚、12脚,mcu芯片u2接受数据后通过输出端输出停止工作信号至电源及通信接口控制电锤的电机停止旋转。
8、进一步的,所述陀螺仪传感器u1的4脚与mcu芯片u2的13脚连接,所述陀螺仪传感器u1的9脚与mcu芯片u2的14脚连接,所述陀螺仪传感器u1的4脚、9脚用于接受mcu输出的停止工作指令,所述mcu芯片u2的13脚、14脚用于输出停止工作指令,当mcu芯片u2为低电平时,陀螺仪传感器u1的4脚、9脚无数据输入输出。
9、进一步的,电容c3与电容c2并联后一端分别与陀螺仪传感器u1的5脚、7脚连接,电容c3与电容c2并联后另一端接地,电容c3与电容c2起到滤波去耦的作用。
10、在一些实施方式中,电源及通信接口h2的3脚与mcu芯片u4的5脚连接,电源及通信接口h2的4脚与mcu芯片u4的6脚连接,mcu芯片u4用于读取陀螺仪传感器u1输入的数据信号并输出信号。
11、进一步的,电容c5与电容c6并联后与电源及通信接口h2的1脚连接,电容c5与电容c6起到滤波去耦的作用。
12、在一些实施方式中,所述程序烧录接口与mcu芯片u4的17脚和18脚连接。
13、在一些实施方式中,所述mcu电路还包括复位电路,mcu芯片u2的4脚与复位电路连接,复位电路由电阻r1和电容c1组成,mcu芯片u2的4脚与电容c1连接,电容c1起到滤波去耦的作用。
14、在一些实施方式中,所述mcu电路还连接有测试led电路,测试led电路包括led1、led2,当电源及通信接口h2提供的电压、电源正常时,led1常亮,当电源及通信接口h2提供的电压、电源异常时,led1闪烁;当陀螺仪传感器u1获取的x轴(平面轴)、y轴(平面轴)、正面轴(z轴)的数据输出正常时,led2闪烁;当陀螺仪传感器u1获取的x轴(平面轴)、y轴(平面轴)、正面轴(z轴)的数据输出异常时,led2常亮。
15、本实用新型的有益效果:一种电动工具状态识别电路,陀螺仪传感器、电源及通信接口、程序烧录接口、mcu电路,陀螺仪传感器与mcu电路双向连接,mcu电路与电源及通信接口的通信端双向连接,电源及通信接口的电源端与陀螺仪传感器、mcu电路连接,通过陀螺仪传感器与可以判断目前状态,当电动工具处于特殊危险状态时输出停止指令,电源及通信接口外部连接的主板可以根据状态实现断电,对使用者进行保护,提高电动工具状态的安全性。
技术特征:
1.一种电动工具状态识别电路,其特征在于,包括:陀螺仪传感器、电源及通信接口、程序烧录接口、mcu电路,其特征在于:陀螺仪传感器与mcu电路双向连接,mcu电路与电源及通信接口的通信端双向连接,电源及通信接口的电源端与陀螺仪传感器、mcu电路连接,电源及通信接口用于为陀螺仪传感器、mcu电路、程序烧录接口供电与将mcu输出的信号输送至外接主板,程序烧录接口与mcu电路双向连接,程序烧录接口用于烧录或/和读取mcu芯片u2内的控制程序并支持在线调试,所述mcu电路还连接有测试led电路,测试led电路包括led1、led2,当电源及通信接口h2提供的电压、电源正常时,led1常亮,当电源及通信接口h2提供的电压、电源异常时,led1闪烁;当陀螺仪传感器u1获取的x轴、y轴、z轴的数据输出正常时,led2闪烁;当陀螺仪传感器u1获取的x轴、y轴、z
2.如权利要求1所述的电动工具状态识别电路,其特征在于,所述陀螺仪传感器u1的1脚与mcu芯片u2的19脚连接,所述陀螺仪传感器u1的14脚与mcu芯片u2的20脚连接,所述陀螺仪传感器u1的13脚与mcu芯片u2的15脚连接,所述陀螺仪传感器u1的12脚与mcu芯片u2的12脚连接,所述陀螺仪传感器u1的1脚、14脚、13脚、12脚均用于输出陀螺仪传感器u1数据信号,所述mcu芯片u2的19脚、20脚、15脚、12脚用于承接陀螺仪传感器u1输出的数据信号。
3.如权利要求1所述的电动工具状态识别电路,其特征在于,所述陀螺仪传感器u1的4脚与mcu芯片u2的13脚连接,所述陀螺仪传感器u1的9脚与mcu芯片u2的14脚连接,所述陀螺仪传感器u1的4脚、9脚用于接受mcu输出的停止工作指令,所述mcu芯片u2的13脚、14脚用于输出停止工作指令,当mcu芯片u2为低电平时,陀螺仪传感器u1的4脚、9脚无数据输入输出。
4.如权利要求1所述的电动工具状态识别电路,其特征在于,电容c3与电容c2并联后一端分别与陀螺仪传感器u1的5脚、7脚连接,电容c3与电容c2并联后另一端接地,电容c3与电容c2起到滤波去耦的作用。
5.如权利要求1所述的电动工具状态识别电路,其特征在于,电源及通信接口h2的3脚与mcu芯片u4的5脚连接,电源及通信接口h2的4脚与mcu芯片u4的6脚连接,mcu芯片u4用于读取陀螺仪传感器u1输入的数据信号并输出信号。
6.如权利要求1所述的电动工具状态识别电路,其特征在于,电容c5与电容c6并联后与电源及通信接口h2的1脚连接,电容c5与电容c6起到滤波去耦的作用。
7.如权利要求1所述的电动工具状态识别电路,其特征在于,所述程序烧录接口与mcu芯片u4的17脚和18脚连接。
8.如权利要求1所述的电动工具状态识别电路,其特征在于,所述mcu电路还包括复位电路,mcu芯片u2的4脚与复位电路连接,复位电路由电阻r1和电容c1组成,mcu芯片u2的4脚与电容c1连接,电容c1起到滤波去耦的作用。
技术总结
本申请提供一种电动工具状态识别电路,陀螺仪传感器、电源及通信接口、程序烧录接口、MCU电路,陀螺仪传感器与MCU电路双向连接,MCU电路与电源及通信接口的通信端双向连接,电源及通信接口的电源端与陀螺仪传感器、MCU电路连接,通过陀螺仪传感器与可以判断目前状态,当电动工具处于特殊危险状态时输出停止指令,电源及通信接口外部连接的主板可以根据状态实现断电,对使用者进行保护,提高电动工具状态的安全性。
技术研发人员:袁礼刚,金乃庆,刘鹏,江冠华
受保护的技术使用者:苏州精源创智能科技有限公司
技术研发日:20230706
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!