一种基于北斗GPS惯性导航模块的四旋翼无人机
本技术涉及四旋翼无人机领域,具体是基于北斗gps惯性导航模块的四旋翼无人机。
背景技术:
1、四旋翼无人机近年来在各个领域都有广泛应用,因其具有稳定性强,体积小,起飞环境要求小等特点,且与固定翼飞机相比具有机动性更高,更易于维护,因此应用广泛。目前“无人机+行业”应用在航拍、农业、运输、救灾、巡检等各个行业。经研究使用四旋翼无人机就可以完成此项工作,因为其起降方便,机动性高,倾斜摄影技术可以很好的弥补人工勘探建模的缺点。
2、另外,在飞行姿态测算中,当在stm32读取mpu6000三轴加速度时,非常容易受到高频噪声的干扰,其高频噪声主要来源于电机,当给无人机上电,并且开启四个电机时,其电机震荡产生的高频噪声导致加速度值几乎无法使用;若stm32读取mpu6000姿态传感器的角速度时,其陀螺仪会发生零偏,其对偏移敏感程度不高,故在偏置时,幅度非常小,不利于状态检测。
技术实现思路
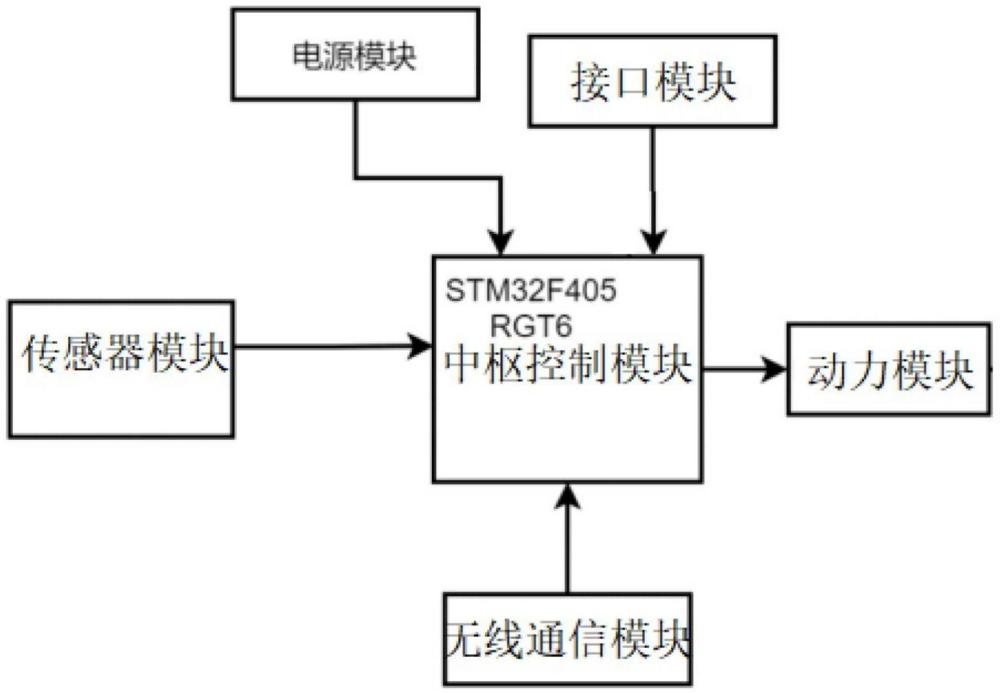
1、为解决上述背景技术中提出的问题,本实用新型提出一种基于北斗gps惯性导航模块的四旋翼无人机,包括中枢控制模块、传感器模块、动力模块、无线通信模块、接口模块和电源模块;
2、所述中枢控制模块包括微控制器mcu、使电路恢复到起始状态的复位电路和时钟晶振,所述中枢控制模块采用stm32f405c8t6作为主控板;
3、所述传感器模块包括mpu6000姿态传感器和bmp280气密计,mpu6000采用spi通信协议与主控板进行通信,bmp280气压计采用iic总线通信协议与主控板进行通信;
4、所述动力模块包括若干无刷电机,并配有电调;
5、所述无线通信模块用于接收fs-i6x无线遥控器发送的ppm信号,并且通过使用uart连接主控板向中枢控制模块发送控制信号;
6、所述接口模块包括一个5p microusb接口,连接主控板detec与dm dp接口,用于使用软件进行传感器复位,还包括swd连接口,连接主控板的swdio与swclk接口,通过连接仿真调试器进行烧写调试程序;
7、所述电源模块使用dc-dc降压模块。
8、本实用新型的进一步设置为:所述复位电路采用上电复位和按钮按下复位两种复位方式。
9、本实用新型的进一步设置为:所述时钟晶振采用8m无源晶振作为外部震荡源。
10、本实用新型的进一步设置为:所述无刷电机为四个rs2205三项无刷电机,所述电调选用一体塔式atk-bl32电调。
11、本实用新型的进一步设置为:所述无线通信模块使用富士x6b接收机作为遥控器的信号接收机。
12、本实用新型具备以下有益效果:本实用新型主要通过采用基于cortex-m4架构的stm32f405rgt6作为系统核心控制器,硬件资料齐全,性能优异,接口丰富方便开发;并且采用高实时性freertos操作系统,解决了裸机开发无法程序并发运行的问题,使得cpu利用率高,兼容性好;兼顾体积小、重量轻、结构简单、维修方便、造价低廉、应用场景广泛等特点,设计制作无人机主控电路板;本实用新型的无人机便于后续使用互补滤波数字滤波方法,通过数据融合实现较为准确的获取mpu6000所提供的欧拉角使整个飞行控制系统变得可调、可控、稳定;传感器方面使用mpu6000作为系统姿态检测传感器,其为整个系统提供角速度与加速度数据。使用bmp280测量无人机的高度,用于定高模式时将无人机平稳的停在设定高度。其接收机使用富士x6b接收机作为遥控器的信号接收机,通过输出6通道数据,然后通过富士fs-i6x遥控器发送ppm信号控制无人机的姿态。
技术特征:
1.一种基于北斗gps惯性导航模块的四旋翼无人机,其特征在于:包括中枢控制模块、传感器模块、动力模块、无线通信模块、接口模块和电源模块;
2.如权利要求1所述的一种基于北斗gps惯性导航模块的四旋翼无人机,其特征在于:所述复位电路采用上电复位和按钮按下复位两种复位方式。
3.如权利要求1所述的一种基于北斗gps惯性导航模块的四旋翼无人机,其特征在于:所述时钟晶振采用8m无源晶振作为外部震荡源。
4.如权利要求1所述的一种基于北斗gps惯性导航模块的四旋翼无人机,其特征在于:所述无刷电机为四个rs2205三项无刷电机,所述电调选用一体塔式atk-bl32电调。
5.如权利要求1所述的一种基于北斗gps惯性导航模块的四旋翼无人机,其特征在于:所述无线通信模块使用富士x6b接收机作为遥控器的信号接收机。
技术总结
本技术公开了一种基于北斗GPS惯性导航模块的四旋翼无人机。本技术主要包括中枢控制模块、传感器模块、动力模块、无线通信模块、接口模块和电源模块;中枢控制模块包括微控制器、使电路恢复到起始状态的复位电路和时钟晶振;传感器模块包括姿态传感器和气密计;动力模块包括若干无刷电机,并配有电调;无线通信模块用于接收无线遥控器发送的PPM信号,并且通过使用UART连接主控板向中枢控制模块发送控制信号;采用STM32系列作为系统核心控制器,硬件资料齐全,性能优异,接口丰富方便开发;并且采用高实时性的操作系统,解决了裸机开发无法程序并发运行的问题,使得CPU利用率高,兼容性好。
技术研发人员:樊迪,张丕振,贺晓盈,陈昊
受保护的技术使用者:沈阳工程学院
技术研发日:20230721
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!