基于OPENMV设计的热机动力智能小车
本技术属于图像采集领域,涉及基于openmv设计的热机动力智能小车。
背景技术:
1、智能小车的研究是当代智能化中的新兴课题,并且智能小车的研究已经成功的为当代的生活提供了很大的便利。当下智能小车发挥的作用也逐步成为社会不可或缺的力量。它能够代替人驾驶汽车,可以代替人去太空采集土壤矿石,可以帮人类打扫家居。而且智能小车的应用远不止这些,未来的智能小车能够发挥出更加强大的功能。因此国内外对智能小车的研究都是比较火热,尤其是在汽车行业界,研究汽车辅助驾驶功能方面更为激烈。
2、针对目前单片机智能小车上的研究,其小车动能设计上大多数基于动力电池供给,通过单片机以及电机驱动模块控制小车的电动机运行,这样设计的小车在续航能力上往往会较差,在设计研发过程中会面临在小车行进中因动能不足而无法正常运行的尴尬问题,并且这种设计方案下的小车,对于其续航模块的设计成本相对较高,会占用较大一部分的设计经费。
技术实现思路
1、为了解决针对现有技术中的动力电池供给不足的问题,并且存在续航能力较差情况,导致小车行进中因动能不足而无法正常运行的尴尬问题,本实用新型采用的技术方案是:一种基于openmv设计的热机动力智能小车,包括控制单元;
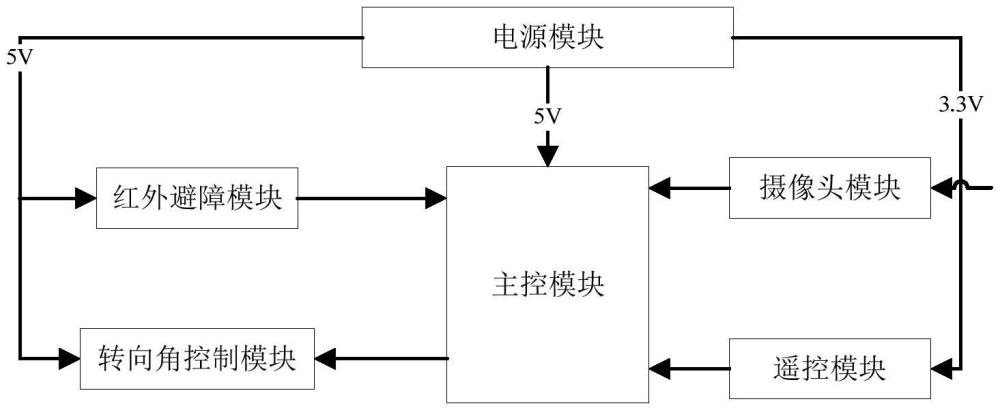
2、所述控制单元包括电源模块、主控模块、摄像头模块、红外避障模块、蓝牙模块和舵机模块;
3、所述主控模块分别和摄像头模块,红外避障模块,蓝牙模块和舵机模块相连接;
4、所述电源模块分别和主控模块、摄像头模块,红外避障模块,蓝牙模块和舵机模块电连接;
5、进一步地,还包括动力单元,所述动力单元采用斯特林发动机。
6、进一步地:还包括手机app端;所述手机app端与所述蓝牙模块无线连接。
7、进一步地:所述电源模块采用的芯片为lm1117。
8、进一步地:所述摄像头模块采用的是open mv3 camm7。
9、进一步地:所述红外避障模块包括红外发射管、光敏接收管和lm358j;
10、所述lm358j的反向输入端与滑动电阻r5的滑动端相连接;
11、所述lm358j的正向输入端与电阻r3一端及光敏接收管一端相连接;
12、所述lm358j的输出端与电阻r4一端相连接,所述电阻r4另一端与led灯负极相连接,所述led灯的正极与所述lm358j的电源端、滑动电阻r5一端、光敏接收管的一端、红外发射管的阳极相连接;所述lm358j的接地端、滑动电阻r5另一端、光敏接收管的另一端、r2的一端相连接。
13、进一步地:所述主控模块采用的芯片型号是atmega328p,所述atmega328p的reset引脚与电容c8一端、开关s1一端、电阻r2一端相连接,所述开关s1另一端、电阻r2另一端接地,电阻r2另一端接5v电源,所述atmega328p的pb1引脚与mg90s的pwm引脚相连接,所述atmega328p的avcc引脚与mg90s的vcc引脚相连接,所述atmega328p的gnd引脚、aref引脚通过电容c7与mg90s的gnd引脚相连接;所述atmega328p的引脚xtal1、引脚xtal2分别连接在晶振y的两端,晶振y与电阻r1并联连接,电阻r1一端与电容c4相连接,电阻r1另一端与电容c5相连接。
14、进一步地:所述蓝牙模块采用的芯片型号是hc-05,hc-05的引脚uart_txd与电阻r7一端及电阻r6一端相连接,电阻r7另一端及r6另一端与电源5v相连接,hc-05的引脚uart_rxd与电阻r6一端相连接,hc-05的引脚pio8通过电阻r8与二极管ds3相连接。
15、进一步地,所述舵机模块采用的舵机为mg90s模拟舵机。
16、本实用新型提供的基于openmv设计的热机动力智能小车,具有以下优点:主要解决小车续航设计成本,以及实现小车智能化研究。该设计主要通过斯特林发动机为小车提供动力,利用open mv实现小车图像采集,实现自动循迹功能,应用hc-05蓝牙模块与手机通信实现遥控控制,并利用红外传感器实现小车避障运行。
17、本实用新型的有益效果在于:
18、(1)本申请设置了动力单元,为智能小车提供动力。
19、(2)本申请设置了电源模块,为控制系统各芯片提供工作电源。
20、(3)本申请设置了主控模块,实现智能小车的控制功能。
21、(4)本申请设置了摄像头模块,实现图像采集功能,使得智能小车能够沿着蓝色色块循迹运行。
22、(5)本申请设置了红外避障模块,通过传感器采集与障碍物距离,从而实现避开障碍物功能。
23、(6)本申请设置了蓝牙模块,实现智能小车与手机app通讯,从而实现无线遥控功能。
24、(7)本申请设置了舵机模块,实现智能小车转向角控制。
技术特征:
1.一种基于openmv设计的热机动力智能小车,其特征在于:包括控制单元;
2.根据权利要求1所述的一种基于openmv设计的热机动力智能小车,其特征在于:还包括手机app端;所述手机app端与所述蓝牙模块无线连接。
3.根据权利要求1所述的一种基于openmv设计的热机动力智能小车,其特征在于:所述电源模块采用的芯片为lm1117。
4.根据权利要求1所述的一种基于openmv设计的热机动力智能小车,其特征在于:所述摄像头模块采用的是open mv3 camm7。
5.根据权利要求1所述的一种基于openmv设计的热机动力智能小车,其特征在于:所述红外避障模块包括红外发射管、光敏接收管和lm358j;
6.根据权利要求1所述的一种基于openmv设计的热机动力智能小车,其特征在于:所述主控模块采用的芯片型号是atmega328p,所述atmega328p的reset引脚与电容c8一端、开关s1一端、电阻r2一端相连接,所述开关s1另一端、电阻r2另一端接地,电阻r2另一端接5v电源,所述atmega328p的pb1引脚与mg90s的pwm引脚相连接,所述atmega328p的avcc引脚与mg90s的vcc引脚相连接,所述atmega328p的gnd引脚、aref引脚通过电容c7与mg90s的gnd引脚相连接;所述atmega328p的引脚xtal1、引脚xtal2分别连接在晶振y的两端,晶振y与电阻r1并联连接,电阻r1一端与电容c4相连接,电阻r1另一端与电容c5相连接。
7.根据权利要求1所述的一种基于openmv设计的热机动力智能小车,其特征在于:所述蓝牙模块采用的芯片型号是hc-05;
8.根据权利要求1所述的一种基于openmv设计的热机动力智能小车,其特征在于:所述舵机模块采用的舵机为mg90s模拟舵机。
技术总结
本技术一种基于OPENMV设计的热机动力智能小车,其特征在于:包括控制单元;控制单元包括电源模块、主控模块、摄像头模块、红外避障模块、蓝牙模块和舵机模块;主控模块分别和摄像头模块,红外避障模块,蓝牙模块和舵机模块相连接;电源模块分别和主控模块、摄像头模块,红外避障模块,蓝牙模块和舵机模块电连接。主要解决小车续航设计成本,以及实现小车智能化研究。该设计主要通过斯特林发动机为小车提供动力,利用OPEN MV实现小车图像采集,实现自动循迹功能,应用HC‑05蓝牙模块与手机通信实现遥控控制,并利用红外传感器实现小车避障运行。
技术研发人员:李慧秀,赵丽娜,魏庆涛,田硕,李莉
受保护的技术使用者:大连科技学院
技术研发日:20230831
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!