一种摆动结构的制作方法
本技术涉及智能仿生尾巴,尤其涉及一种摆动结构。
背景技术:
1、可动尾巴的摆动机构采用线拉骨架,骨架是采用独立的组件拼接而成,并由三到四根钢丝绳贯穿骨架边缘的开槽,拉动其中一根钢丝即可让骨架整体弯曲。钢丝一般由舵机驱动,这个结构可以实现对尾巴的控制,可以控制摆动的频率和方向。但是因为采用的是钢丝绳线拉操控,有几个弊端,钢丝绳的回弹力会对舵机施加极大的拉力,有可能损坏舵机,而且一旦舵机损坏,整个尾巴都无法动弹,没有冗余设计。并且拉绳无法操控尾巴的精确指向,同一时间内只能摆向一个方向,无法单独控制某一个关节,并且无法实现s形尾巴指向,因此本方案提供一种摆动结构。
技术实现思路
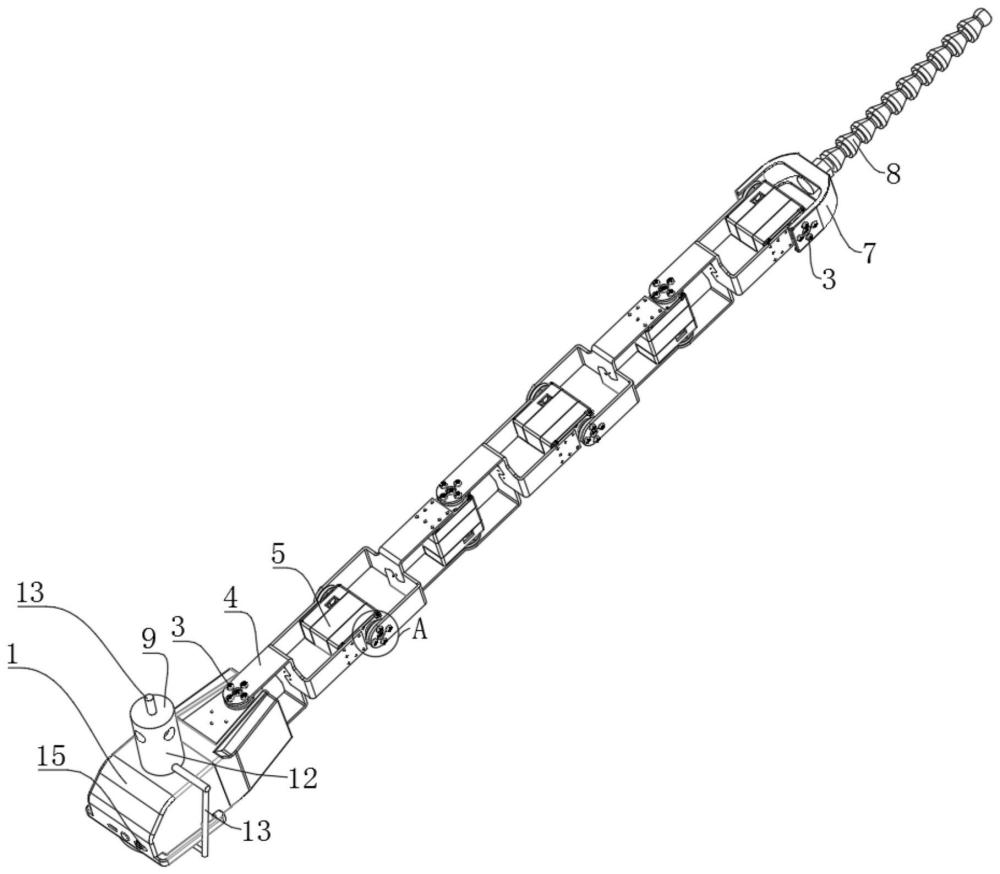
1、为了实现上述目的,本实用新型采用了如下技术方案:一种摆动结构,包括:尾巴控制盒,所述尾巴控制盒的输出轴转动连接有扭转摆臂,所述扭转摆臂通过螺丝连接有转轴,所述转轴的一端转动连接有舵机,多个所述扭转摆臂位置呈相互交叉,所述舵机的一侧固定连接在前一个所述扭转摆臂的一侧,所述扭转摆臂的一侧转动连接有u型板,所述u型板的一侧固定连接有尾尖,所述尾巴控制盒上设有移动吸附机构。
2、作为一种优选的实施方式,所述尾巴控制盒的一侧滑动连接有开关滑板。
3、采用上述进一步方案的技术效果是:当需要把仿生尾巴进行摇摆时,工作人员先通过开关滑板打开尾巴控制盒,通过输出轴带动多个交叉连接的扭转摆臂,如说明书附图1所示,第一个扭转摆臂带着舵机进行左右翻动,接着舵机带动第二个扭转摆臂进上下摆动,依次往复摆动,该可以在同一时间可以实现s型摆向,并且也不会对舵机产生损害,当需要安装尾巴控制盒时,只需要通过移动吸附机构即可。
4、作为一种优选的实施方式,所述移动吸附机构包括有气压筒,所述尾巴控制盒的顶部固定连接有气压筒,所述气压筒的内壁滑动连接有活塞,所述活塞的一侧固定连接有拉杆,所述拉杆的一侧贯穿连接在气压筒的顶端,所述尾巴控制盒的底部固定连接有吸盘,所述吸盘的一侧固定连接有气管,所述气管的一端固定连接在气压筒的一端。
5、采用上述进一步方案的技术效果是:当需要安装尾巴控制盒时,工作人员先确保活塞已经在气压筒的底端,然后把吸盘吸附在需要安装的位置,最后逆向向外拉动拉杆,通过气管吸收气压,使吸盘内壁压强小于外界压强,进而使吸盘紧紧吸附在需要安装的位置,并且安装步骤简单。
6、作为一种优选的实施方式,所述气压筒靠近顶端的一端开设有多个通气槽。
7、采用上述进一步方案的技术效果是:当需要取下尾巴控制盒时,工作人员只需要把活塞拉到气压筒的顶端,使通气槽与气压筒底端贯通,通过气管使吸盘内壁压强与外界压强持平即可。
8、与现有技术相比,本实用新型的优点和积极效果在于,
9、本实用新型,该摆动结构通过移动吸附机构和扭转摆臂解决了仿生尾巴无法实现s形尾巴指向的问题,当工作人员需要把随意摆动形状时,只需要启动尾巴控制盒和多个扭转摆臂即可,同时当需要安装尾巴控制盒时,为了简化便捷,只需要把吸盘吸附在需要安装的位置,然后手动向外拉动拉杆即可,操作步骤简单,增加其摆动机构的便捷性。
技术特征:
1.一种摆动结构,其特征在于,包括:尾巴控制盒(1),所述尾巴控制盒(1)的输出轴转动连接有扭转摆臂(4),所述扭转摆臂(4)通过螺丝(3)连接有转轴(6),所述转轴(6)的一端转动连接有舵机(5),多个所述扭转摆臂(4)位置呈相互交叉,所述舵机(5)的一侧固定连接在前一个所述扭转摆臂(4)的一侧,所述扭转摆臂(4)的一侧转动连接有u型板(7),所述u型板(7)的一侧固定连接有尾尖(8),所述尾巴控制盒(1)上设有移动吸附机构。
2.根据权利要求1所述的一种摆动结构,其特征在于:所述尾巴控制盒(1)的一侧滑动连接有开关滑板(15)。
3.根据权利要求1所述的一种摆动结构,其特征在于:所述移动吸附机构包括有气压筒(9),所述尾巴控制盒(1)的顶部固定连接有气压筒(9),所述气压筒(9)的内壁滑动连接有活塞(10),所述活塞(10)的一侧固定连接有拉杆(11),所述拉杆(11)的一侧贯穿连接在气压筒(9)的顶端。
4.根据权利要求3所述的一种摆动结构,其特征在于:所述尾巴控制盒(1)的底部固定连接有吸盘(14),所述吸盘(14)的一侧固定连接有气管(13),所述气管(13)的一端固定连接在气压筒(9)的一端。
5.根据权利要求4所述的一种摆动结构,其特征在于:所述气压筒(9)靠近顶端的一端开设有多个通气槽(12)。
技术总结
本技术提供一种摆动结构,涉及智能仿生尾巴技术领域,包括:尾巴控制盒,所述尾巴控制盒的输出轴转动连接有扭转摆臂,所述扭转摆臂通过螺丝连接有转轴,所述转轴的一端转动连接有舵机,多个所述扭转摆臂位置呈相互交叉,所述舵机的一侧固定连接在前一个所述扭转摆臂的一侧,所述扭转摆臂的一侧转动连接有U型板,所述U型板的一侧固定连接有尾尖,所述尾巴控制盒上设有移动吸附机构,所述尾巴控制盒的一侧滑动连接有开关滑板。本技术,该摆动结构通过移动吸附机构和扭转摆臂解决了仿生尾巴无法实现S形尾巴指向的问题,当工作人员需要把随意摆动形状时,只需要启动尾巴控制盒和多个扭转摆臂即可。
技术研发人员:詹召
受保护的技术使用者:深圳市预筑科技有限公司
技术研发日:20230905
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!