具有高可靠性传感器检测机制的无人机拦阻系统的制作方法
本技术涉及无人机,具体涉及一种具有高可靠性传感器检测机制的无人机拦阻系统。
背景技术:
1、随着现代航空工业的发展,无人机使用越来越广泛,在国民经济、军事等多个领域获得广泛应用,如:空中侦察、监视、通信、反潜、电子干扰等。相比无人机的蓬勃发展,其配套的拦阻系统相对发展延后,使大型无人机的使用受到了很大程度的限制。拦阻系统的作用是将正常降落或因意外原因冲出跑道的无人机在拦阻设备的作用下将无人机拦停,保障无人机安全。
2、现有的无人机拦阻系统,在实现检测拦阻带带速方面还没有可靠性的技术,在实际应用中,常常由于各种原因导致无人机拦阻系统检测带速的无法正常运行,可靠性较低。
技术实现思路
1、本实用新型是为了解决现有技术中无人机拦阻系统在检测带速上可靠性较低的技术问题,目的在于提供一种具有高可靠性传感器检测机制的无人机拦阻系统,通过分别独立的在滚轮和拦阻带收卷装置上设置两个传感器,不仅解决了检测拦阻带带速的问题,还确保了无人机拦阻系统检测拦阻带带速的正常运行,保障了检测的可靠性。
2、本实用新型通过下述技术方案实现:
3、一种具有高可靠性传感器检测机制的无人机拦阻系统,包括拦阻带收卷装置、拦阻带本体、滚轮和电控箱装置,所述拦阻带本体盘绕连接在拦阻带收卷装置上,所述拦阻带本体表面与滚轮表面贴合,所述滚轮和拦阻带收卷装置上均设置有传感器,所述电控箱装置与传感器连接。
4、作为本实用新型进一步的技术方案,所述拦阻带收卷装置包括收卷中心轴和收卷盘,所述收卷盘固定在收卷中心轴上。
5、作为本实用新型进一步的技术方案,所述收卷中心轴上设置有传感器一。
6、作为本实用新型进一步的技术方案,所述滚轮包括滚轮一、滚轮二和滚轮三,所述拦阻带本体表面依次与滚轮一的底部、滚轮二的顶部以及滚轮三的底部贴合。
7、作为本实用新型进一步的技术方案,所述滚轮一、滚轮二和滚轮三中,任意一个滚轮上设置有传感器二。
8、作为本实用新型进一步的技术方案,所述滚轮二的滚轮中心轴上设置有传感器二。
9、作为本实用新型进一步的技术方案,所述传感器通过挠性联轴器与滚轮、拦阻带收卷装置的中心轴固定。
10、作为本实用新型进一步的技术方案,所述电控箱装置内设置有plc模块,所述传感器与plc模块电连接。
11、作为本实用新型进一步的技术方案,所述电控箱装置表面设置有触摸屏。
12、作为本实用新型进一步的技术方案,所述电控箱装置内还设置有电源模块,所述电源模块连接plc模块和触摸屏为其供电。
13、本实用新型与现有技术相比,具有如下的优点和有益效果:
14、本实用新型当在对降落的无人机进行拦截时,拦阻带本体从拦阻带收卷装置上放卷,从而对降落的无人机进行拦截使其减速并拦停,以保障无人机安全,滚轮或者拦阻带收卷装置上设置的任意一个传感器工作,并将转速信号反馈至电控箱装置进行数据处理并通过人机交互界面显示拦阻带的带速,当滚轮或者拦阻带收卷装置上任意一个传感器失效时,另外一个传感器立即启用,从而确保了无人机拦阻系统检测拦阻带带速的正常运行,提高了拦阻带带速检测的可靠性。
技术特征:
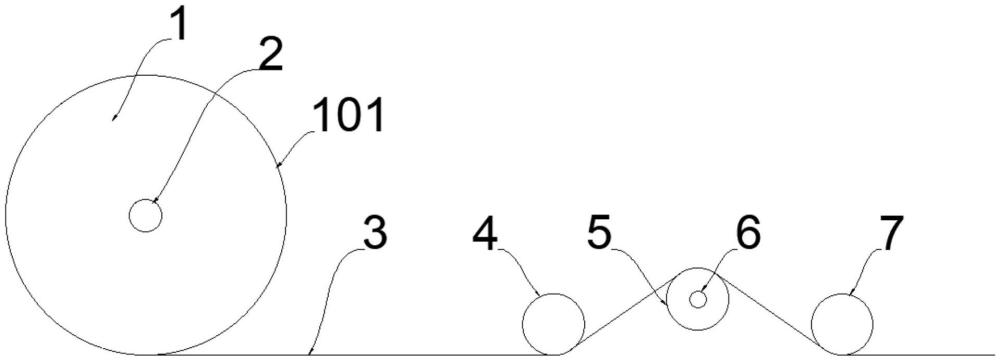
1.具有高可靠性传感器检测机制的无人机拦阻系统,其特征在于,包括拦阻带收卷装置(1)、拦阻带本体(3)、滚轮和电控箱装置(8),所述拦阻带本体(3)盘绕连接在拦阻带收卷装置(1)上,所述拦阻带本体(3)表面与滚轮表面贴合,所述滚轮和拦阻带收卷装置(1)上均设置有传感器,所述电控箱装置(8)与传感器连接。
2.根据权利要求1所述的具有高可靠性传感器检测机制的无人机拦阻系统,其特征在于,所述拦阻带收卷装置(1)包括收卷中心轴和收卷盘(101),所述收卷盘(101)固定在收卷中心轴上。
3.根据权利要求2所述的具有高可靠性传感器检测机制的无人机拦阻系统,其特征在于,所述收卷中心轴上设置有传感器一(2)。
4.根据权利要求1所述的具有高可靠性传感器检测机制的无人机拦阻系统,其特征在于,所述滚轮包括滚轮一(4)、滚轮二(5)和滚轮三(7),所述拦阻带本体(3)表面依次与滚轮一(4)的底部、滚轮二(5)的顶部以及滚轮三(7)的底部贴合。
5.根据权利要求4所述的具有高可靠性传感器检测机制的无人机拦阻系统,其特征在于,所述滚轮一(4)、滚轮二(5)和滚轮三(7)中,任意一个滚轮上设置有传感器二(6)。
6.根据权利要求5所述的具有高可靠性传感器检测机制的无人机拦阻系统,其特征在于,所述滚轮二(5)的滚轮中心轴上设置有传感器二(6)。
7.根据权利要求1所述的具有高可靠性传感器检测机制的无人机拦阻系统,其特征在于,所述传感器通过挠性联轴器与滚轮、拦阻带收卷装置(1)的中心轴固定。
8.根据权利要求1所述的具有高可靠性传感器检测机制的无人机拦阻系统,其特征在于,所述电控箱装置(8)内设置有plc模块(10),所述传感器与plc模块(10)电连接。
9.根据权利要求8所述的具有高可靠性传感器检测机制的无人机拦阻系统,其特征在于,所述电控箱装置(8)表面设置有触摸屏(9)。
10.根据权利要求9所述的具有高可靠性传感器检测机制的无人机拦阻系统,其特征在于,所述电控箱装置(8)内还设置有电源模块(11),所述电源模块(11)连接plc模块(10)和触摸屏(9)为其供电。
技术总结
本技术公开了一种具有高可靠性传感器检测机制的无人机拦阻系统,涉及无人机技术领域,解决现有技术中无人机拦阻系统在检测带速上可靠性较低的技术问题;包括拦阻带收卷装置、拦阻带本体、滚轮和电控箱装置,所述拦阻带本体盘绕连接在拦阻带收卷装置上,所述拦阻带本体表面与滚轮表面贴合,所述滚轮和拦阻带收卷装置上均设置有传感器,所述电控箱装置与传感器连接;本技术通过分别独立的在滚轮和拦阻带收卷装置上设置两个传感器,不仅解决了检测拦阻带带速的问题,还确保了无人机拦阻系统检测拦阻带带速的正常运行,保障了检测的可靠性。
技术研发人员:任晓峰,于洪源
受保护的技术使用者:四川五洲仁信科技有限公司
技术研发日:20231025
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!