高功率微波装置数字化仿真的天线控制方法及仿真平台与流程
本发明涉及高功率微波数字化仿真,具体涉及一种高功率微波装置数字化仿真的天线控制方法及仿真平台。
背景技术:
1、采用数字化仿真技术开展高功率微波装置对集群目标的效能评估是高功率微波装置数字化模型的主要应用方向,为了更真实的模拟采用机械转台的高功率微波装置天线的运动过程及指向精度,需要构建一种用于数字化仿真的机械天线运动控制方法。
2、目前,在采用机械转台的高功率微波装置天线仿真过程中,缺乏对机械天线运动过程的精细化运动过程的解算,无法准确体现天线的加速、匀速、减速的运动过程,无法展示天线对目标跟踪引导、锁定及收敛过程。
3、因此,现有技术有待于进一步发展。
技术实现思路
1、本发明的目的在于克服上述技术不足,提供一种高功率微波装置数字化仿真的天线控制方法及仿真平台,以解决相关技术中无法准确体现天线的加速、匀速、减速的运动过程,无法展示天线对目标跟踪引导、锁定及收敛过程的技术问题。
2、为达到上述技术目的,本发明采取了以下技术方案:提供了一种高功率微波装置数字化仿真的天线控制方法,包括:
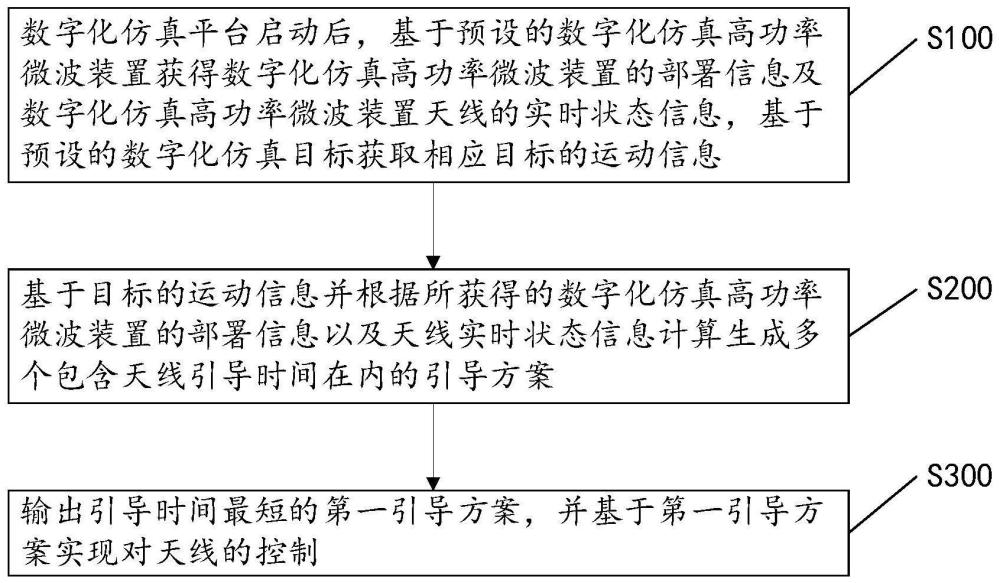
3、数字化仿真平台启动后,基于预设的数字化仿真高功率微波装置获得数字化仿真高功率微波装置的部署信息及数字化仿真高功率微波装置天线的实时状态信息,基于预设的数字化仿真目标获取相应目标的运动信息;
4、基于目标的运动信息并根据所获得的数字化仿真高功率微波装置的部署信息以及天线实时状态信息计算生成多个包含天线引导时间在内的引导方案;
5、输出引导时间最短的第一引导方案,并基于第一引导方案实现对天线的控制。
6、进一步地,数字化仿真高功率微波装置的部署信息包括:数字化仿真高功率微波装置的实时经度、纬度、高度及速度;
7、数字化仿真高功率微波装置天线的实时状态信息包括:天线的实时指向、角速度及角加速度;
8、目标的运动信息包括:目标相对于数字化仿真高功率微波装置的方位角、方位角速度、俯仰角及俯仰角速度。
9、进一步地,根据所获得的数字化仿真高功率微波装置的部署信息以及天线实时状态信息获取天线的可引导范围,判断目标是否在天线的可引导范围内,若不在,则输出针对天线的第二引导方案,并基于第二引导方案实现对天线的控制。
10、进一步地,当目标在数字化仿真高功率微波装置的天线可引导范围内时,基于目标的运动信息并根据所获得的数字化仿真高功率微波装置的部署信息以及天线实时状态信息计算引导方案,引导方案中包括引导时间,引导时间为将天线实时指向角度引导至目标角度且天线角速度与目标实时角速度一致时的时间。
11、进一步地,引导时间包括方位引导时间,方位引导时间通过下式计算得到:
12、
13、
14、
15、
16、
17、
18、
19、
20、其中,t1、t2、t3、t4、t5、t6、t7、t8为不同引导方案对应的方位引导时间,θmf为引导目标方位角,ωmf为引导目标方位角速度,θtf为天线实时方位角,ωtf为天线实时方位角速度,ωtfmax为天线方位最大角速度,atfmax为天线方位最大角加速度。
21、进一步地,引导时间包括俯仰引导时间,俯仰引导时间通过下式计算得到:
22、
23、
24、
25、
26、其中,t9、t10、t11、t12为不同引导方案对应的俯仰引导时间,θmh为引导目标俯仰角,ωmh为引导目标俯仰角速度,θth为天线实时俯仰角,ωth为天线实时俯仰角速度,ωthmax为天线俯仰最大角速度,athmax为天线俯仰最大角加速度。
27、进一步地,基于所生成的多个包含天线引导时间在内的引导方案,获取引导时间最短的第一引导方案,其中,最短引导时间通过下式计算得到:
28、ts=max(tf,th),
29、其中,ts为最小引导时间,tf为方位最小引导时间,th为俯仰最小引导时间。
30、一种计算机可读存储介质,计算机存储介质中存储有计算机可读指令,当计算机可读指令在通信装置上运行时,使得上述的方法被执行。
31、一种高功率微波装置仿真平台,高功率微波装置仿真平台包含有计算机可读指令,当计算机可读指令在数字化仿真平台上运行时,使得上述的方法被执行。
32、有益效果:
33、本发明的一种高功率微波装置数字化仿真的天线控制方法及仿真平台,用于高功率微波装置仿真系统数字化模型的构建以及高功率微波装置全流程的仿真评估。通过天线实时位置及速度,目标相对于装置的空间位置,解算天线的运动方向、速度及加速度,模拟高功率微波装置机械天线的运动方式,使得数字化仿真过程与实际装置运行流程更加相似,提高了数字化仿真的置信度。
技术特征:
1.一种高功率微波装置数字化仿真的天线控制方法,其特征在于,包括:
2.根据权利要求1所述的高功率微波装置数字化仿真的天线运动控制方法,其特征在于,数字化仿真高功率微波装置的部署信息包括:数字化仿真高功率微波装置的实时经度、纬度、高度及速度;
3.根据权利要求2所述的高功率微波装置数字化仿真的天线运动控制方法,其特征在于,根据所获得的数字化仿真高功率微波装置的部署信息以及天线实时状态信息获取天线的可引导范围,判断目标是否在天线的可引导范围内,若不在,则输出针对天线的第二引导方案,并基于第二引导方案实现对天线的控制。
4.根据权利要求3所述的高功率微波装置数字化仿真的天线运动控制方法,其特征在于,当目标在数字化仿真高功率微波装置的天线可引导范围内时,基于目标的运动信息并根据所获得的数字化仿真高功率微波装置的部署信息以及天线实时状态信息计算引导方案,所述引导方案中包括引导时间,所述引导时间为将天线实时指向角度引导至目标角度且天线角速度与目标实时角速度一致时的时间。
5.根据权利要求4所述的高功率微波装置数字化仿真的天线运动控制方法,其特征在于,所述引导时间包括方位引导时间,方位引导时间通过下式计算得到:
6.根据权利要求5所述的高功率微波装置数字化仿真的天线运动控制方法,其特征在于,所述引导时间包括俯仰引导时间,俯仰引导时间通过下式计算得到:
7.根据权利要求1所述的高功率微波装置数字化仿真的天线运动控制方法,其特征在于,基于所生成的多个包含天线引导时间在内的引导方案,获取引导时间最短的第一引导方案,其中,最短引导时间通过下式计算得到:
8.一种计算机可读存储介质,其特征在于,所述计算机存储介质中存储有计算机可读指令,当所述计算机可读指令在通信装置上运行时,使得权利要求1~8任一项所述的方法被执行。
9.一种高功率微波装置仿真平台,其特征在于,所述高功率微波装置仿真平台包含有计算机可读指令,当所述计算机可读指令在所述数字化仿真平台上运行时,使得权利要求1~8任一项所述的方法被执行。
技术总结
本发明提供了一种高功率微波装置数字化仿真的天线控制方法及仿真平台,包括:数字化仿真平台启动后,基于预设的数字化仿真高功率微波装置获得数字化仿真高功率微波装置的部署信息及数字化仿真高功率微波装置天线的实时状态信息,基于预设的数字化仿真目标获取相应目标的运动信息;基于目标的运动信息并根据所获得的数字化仿真高功率微波装置的部署信息以及天线实时状态信息计算生成多个包含天线引导时间在内的引导方案;输出引导时间最短的第一引导方案,并基于第一引导方案实现对天线的控制,解决了相关技术中无法准确体现天线的加速、匀速、减速的运动过程,无法展示天线对目标跟踪引导、锁定及收敛过程的技术问题。
技术研发人员:袁欢,冯溪溪,戈弋,陈朝阳,邓浩,夏德宏,李艾
受保护的技术使用者:中国工程物理研究院应用电子学研究所
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!