一种无驾驶室L4无人驾驶牵引车遥控系统及方法与流程
本发明涉及无人驾驶,具体地说,涉及一种无驾驶室l4无人驾驶牵引车遥控系统及方法。
背景技术:
1、随着物流业的不断发展,牵引车的运输需求越来越大。然而,传统的人工驾驶牵引车存在着许多问题,例如人力成本高、驾驶员疲劳驾驶、交通事故等问题。因此,无人驾驶技术成为了解决这些问题的重要手段。
2、目前,无人驾驶技术已经在物流领域得到了广泛应用。但是,在实际应用中,由于牵引车的复杂性和特殊性,无人驾驶技术的应用仍然存在一定的难度。特别是在无驾驶室之后,牵引车的操作和控制方面,仍然存在许多问题,例如在无人驾驶失效后如何及时接管车辆,控制系统本身引发的故障风险。
技术实现思路
1、为了解决上述技术问题,本发明通过下述技术方案得以解决。
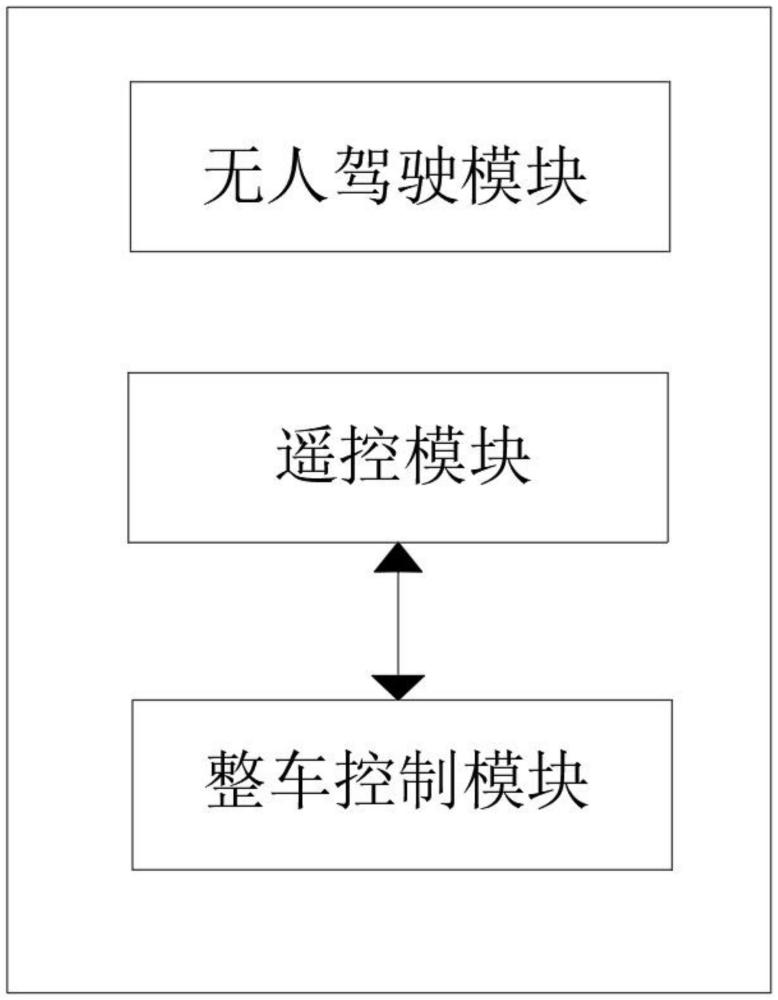
2、一种无驾驶室l4无人驾驶牵引车遥控系统,其包括系统本体,系统本体包括无人驾驶模块、遥控模块、整车控制模块;
3、无人驾驶模块用于向牵引车发送自动驾驶信号;
4、遥控模块用于向牵引车发送遥控信号;
5、整车控制模块用于与遥控模块构建数据交互并控制牵引车执行动作。
6、作为本发明优选的方案,遥控信号包括驾驶模式切换指令、上下电控制指令、油门指令、刹车指令、转向指令、档位指令、急停指令、功能开关指令。
7、作为本发明优选的方案,遥控模块包括遥控器,遥控器包括操纵杆、按键及控制芯片。
8、作为本发明优选的方案,系统本体还包括线控转向模块,线控转向模块包括线控转向电机、转向系结构件、转向助力。
9、作为本发明优选的方案,系统本体还包括线控制动模块,线控制动模块包括制动控制器、桥模组控制阀、制动气室及气管路。
10、作为本发明优选的方案,系统本体还包括线控悬架模块,线控悬架模块包括悬架控制器、气囊、高度传感器。
11、一种无驾驶室l4无人驾驶牵引车遥控方法,其包括如下步骤:
12、s1、获取牵引车驾驶信号;
13、s2、将牵引车驾驶信号从自动驾驶信号切换到遥控信号;
14、s3、遥控模块发送遥控信号,整车控制模块接收所述遥控信号并控制牵引车执行动作。
15、与现有技术相比,本发明的有益效果是:
16、本发明在实际使用时,当牵引车自动驾驶失效后,操作人员能够将牵引车的驾驶信号从自动驾驶信号切换到遥控信号,并通过遥控模块发送遥控信号,使得整车控制模块控制牵引车进行动作。
技术特征:
1.一种无驾驶室l4无人驾驶牵引车遥控系统,其特征在于:包括系统本体,系统本体包括无人驾驶模块、遥控模块、整车控制模块;
2.根据权利要求1所述的一种无驾驶室l4无人驾驶牵引车遥控系统,其特征在于:遥控信号包括驾驶模式切换指令、上下电控制指令、油门指令、刹车指令、转向指令、档位指令、急停指令、功能开关指令。
3.根据权利要求1所述的一种无驾驶室l4无人驾驶牵引车遥控系统,其特征在于:遥控模块包括遥控器,遥控器包括操纵杆、按键及控制芯片。
4.根据权利要求1所述的一种无驾驶室l4无人驾驶牵引车遥控系统,其特征在于:系统本体还包括线控转向模块,线控转向模块包括线控转向电机、转向系结构件、转向助力。
5.根据权利要求1所述的一种无驾驶室l4无人驾驶牵引车遥控系统,其特征在于:系统本体还包括线控制动模块,线控制动模块包括制动控制器、桥模组控制阀、制动气室及气管路。
6.根据权利要求1所述的一种无驾驶室l4无人驾驶牵引车遥控系统,其特征在于:系统本体还包括线控悬架模块,线控悬架模块包括悬架控制器、气囊、高度传感器。
7.一种无驾驶室l4无人驾驶牵引车遥控方法,其通过权利要求1-6任一所述的一种无驾驶室l4无人驾驶牵引车遥控系统实现,其包括如下步骤:
技术总结
本发明涉及无人驾驶技术领域,具体地说,涉及一种无驾驶室L4无人驾驶牵引车遥控系统及方法。该系统包括无人驾驶模块用于向牵引车发送自动驾驶信号;遥控模块用于向牵引车发送遥控信号;整车控制模块用于与遥控模块构建数据交互并控制牵引车执行动作。在实际使用时,当牵引车自动驾驶失效后,操作人员能够将牵引车的驾驶信号从自动驾驶信号切换到遥控信号,并通过遥控模块发送遥控信号,使得整车控制模块控制牵引车进行动作。该方法通过该系统实现,其包括如下步骤:S1、获取牵引车驾驶信号;S2、将牵引车驾驶信号从自动驾驶信号切换到遥控信号;S3、遥控模块发送遥控信号,整车控制模块接收所述遥控信号并控制牵引车执行动作。
技术研发人员:李博,郭健,任志鸿,杨辉,王佳,李威华,岳斌,田多兵
受保护的技术使用者:陕西风润智能制造研究院有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!