路径规划方法、装置、车辆及存储介质与流程
本申请实施例涉及自动驾驶,具体涉及一种路径规划方法、装置、车辆及存储介质。
背景技术:
1、随着自动驾驶技术的快速发展,路径规划作为无人车领域的核心技术之一,一直以来受到广泛的关注和研究。
2、近年来,基于快速搜索随机树的路径规划方法受到了青睐。相关技术中,当已知车辆的起点和终点时,分别以起点和终点为根节点创建两棵随机树,并生成随机采样点加入随机树内,直至最终两棵随机树中的节点形成一条路径。
3、然而,发明人在研究中发现:目前的快速搜索随机树算法中,随机树中的节点是盲目随机采样(即,随机采样方向完全随机)得到的,使得相关技术中规划得到的路径可能存在采集到的节点过多,带来了很大的存储压力,同时导致了对于随机树节点的搜索效率低下,耗时长,造成路径规划的整体效率较低。
4、因此,如何减轻路径规划过程中的存储压力并提高路径规划的效率,是当前亟待解决的问题。
技术实现思路
1、本申请实施例提出了一种路径规划方法、装置、车辆及存储介质,以解决上述问题。
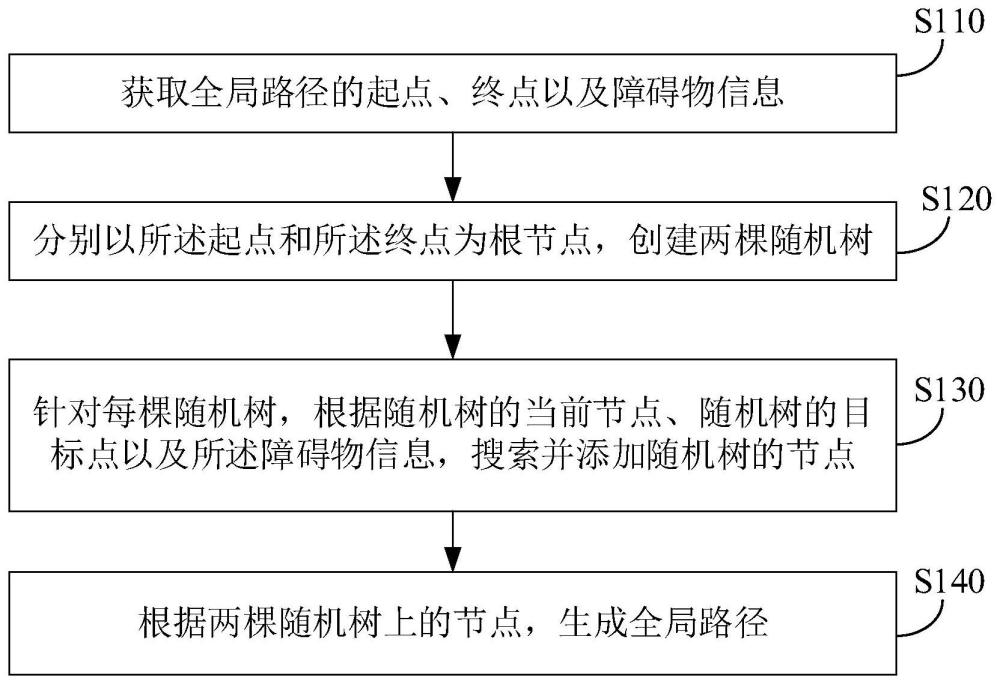
2、第一方面,本申请实施例提供了一种路径规划方法,所述方法包括:获取全局路径的起点、终点以及障碍物信息;针对每棵随机树,根据随机树的当前节点、随机树的目标点以及所述障碍物信息,搜索并添加随机树的节点,其中,所述起点对应的随机树以所述终点作为目标点,所述终点对应的随机树以所述起点对应的随机树上最新添加的节点作为目标点;根据两棵随机树上的节点,生成全局路径。
3、第二方面,本申请实施例提供了一种路径规划装置,所述装置包括:数据获取模块,用于获取全局路径的起点、终点以及障碍物信息;随机树建立模块,用于针对每棵随机树,根据随机树的当前节点、随机树的目标点以及所述障碍物信息,搜索并添加随机树的节点,其中,所述起点对应的随机树以所述终点作为目标点,所述终点对应的随机树以所述起点对应的随机树上最新添加的节点作为目标点;路径生成模块,用于根据两棵随机树上的节点,生成全局路径。
4、第三方面,本申请实施例提供了一种车辆,所述车辆包括存储器以及一个或多个处理器,其中,所述存储器中存储有一个或多个应用程序,所述一个或多个应用程序用于当被所述一个或多个处理器调用时执行如上所述的方法。
5、第四方面,本申请实施例提供了一种计算机可读取存储介质,所述计算机可读取存储介质中存储有程序代码,所述程序代码用于当被处理器调用时执行如上所述的方法。
6、在本申请实施例提供的路径规划方法、装置、车辆及存储介质中,通过获取路径的起点、终点以及障碍物信息;分别以所述起点和所述终点为根节点,创建两棵随机树;结合障碍物信息,起点对应的随机树始终以终点为目标进行节点的搜索与添加,终点对应的随机树始终以起点对应的随机树上最新添加的节点为目标进行节点的搜索与添加,从而使得两棵随机树的节点扩展具有方向性,即,两个随机树相向扩展,不断靠近,从而可以减少多余节点的扩展,减少数据的存储量,提升节点搜索效率以及整体路径规划效率。
技术特征:
1.一种路径规划方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述针对每棵随机树,根据随机树的当前节点、随机树的目标点以及所述障碍物信息,搜索并添加随机树的节点,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述采样点和所述障碍物信息,搜索并添加随机树的节点,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述当前节点的上一节点、所述采样点以及所述障碍物信息,搜索并添加随机树的节点,包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述采样点重新确定采样区域,包括:
6.根据权利要求1-5任一项所述的方法,其特征在于,所述根据两棵随机树上的节点,生成全局路径,包括:
7.根据权利要求6所述的方法,其特征在于,所述连接两棵随机树上的所有节点,得到全局路径,包括:
8.一种路径规划装置,其特征在于,所述装置包括:
9.一种车辆,其特征在于,包括存储器以及一个或多个处理器,其中,所述存储器中存储有一个或多个应用程序,所述一个或多个应用程序用于当被所述一个或多个处理器调用时执行如权利要求1-7任一项所述的方法。
10.一种计算机可读取存储介质,其特征在于,所述计算机可读取存储介质中存储有程序代码,所述程序代码用于当被处理器调用时执行如权利要求1-7任一项所述的方法。
技术总结
本申请实施例提供一种路径规划方法、装置、车辆及存储介质,涉及自动驾驶技术领域。通过获取全局路径的起点、终点以及障碍物信息;分别以所述起点和所述终点为根节点,创建两棵随机树;针对每棵随机树,根据随机树的当前节点、随机树的目标点以及所述障碍物信息,搜索并添加随机树的节点,其中,所述起点对应的随机树以所述终点作为目标点,所述终点对应的随机树以所述起点对应的随机树上最新添加的节点作为目标点;根据两棵随机树上的节点,生成全局路径,从而使得两棵随机树的节点扩展具有方向性,即,两棵随机树相向扩展,不断靠近,从而可以减少多余节点的扩展,减少数据的存储量,提升节点搜索效率以及整体路径规划效率。
技术研发人员:夏博昱,黄子浩,钟国旗,陈欢,狄桓宇,陈文强
受保护的技术使用者:广州汽车集团股份有限公司
技术研发日:
技术公布日:2024/5/27
- 还没有人留言评论。精彩留言会获得点赞!