基于数字孪生的运动仿真方法、装置以及计算机设备与流程
本申请涉及仿真,特别是涉及一种基于数字孪生的运动仿真方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
背景技术:
1、现代物流系统往往结构复杂,构造繁琐,各子系统搭建难度也较大,物流系统投入使用后通常需要物流设备来对多种类物料进行运输,工作强度较大。
2、然而,在实际物料运输中,若出现物流设备运输物料不稳定的情况,需要对物流设备的输送过程进行调整,导致物流效率不高。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高物流效率的基于数字孪生的运动仿真方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本申请提供了一种基于数字孪生的运动仿真方法。所述方法包括:
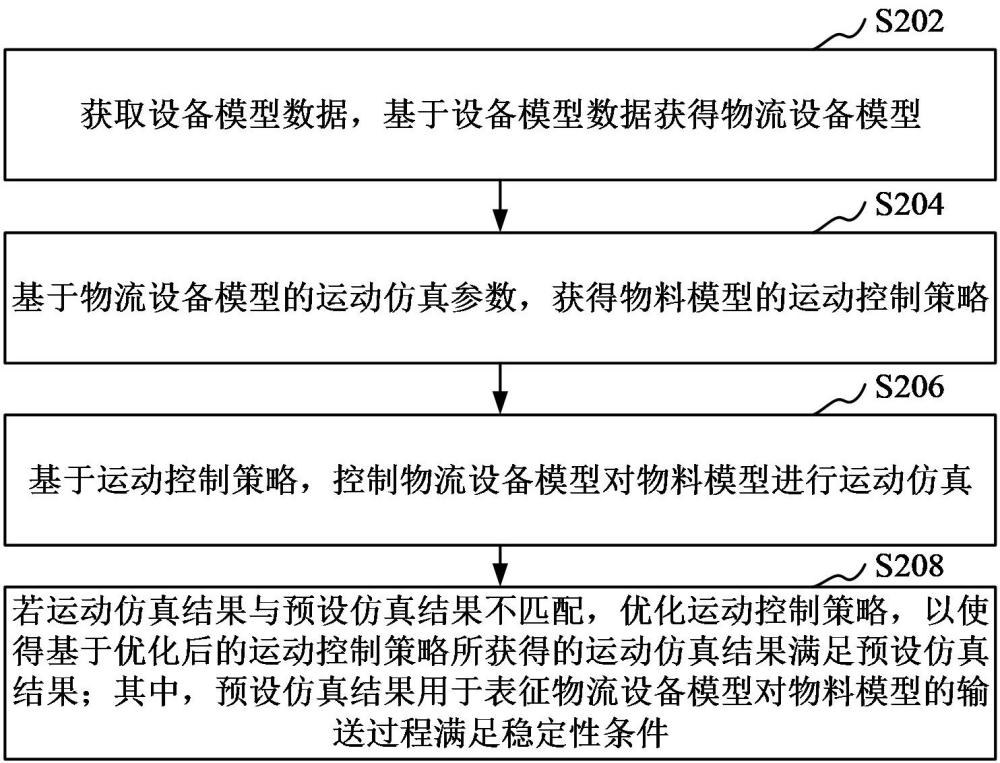
3、获取设备模型数据,基于所述设备模型数据获得物流设备模型;
4、基于所述物流设备模型的运动仿真参数,获得物料模型的运动控制策略;
5、基于所述运动控制策略,控制所述物流设备模型对所述物料模型进行运动仿真;
6、若运动仿真结果与预设仿真结果不匹配,优化所述运动控制策略,以使得基于优化后的运动控制策略所获得的运动仿真结果满足所述预设仿真结果;其中,所述预设仿真结果用于表征所述物流设备模型对所述物料模型的输送过程满足稳定性条件。
7、在其中一个实施例中,所述若运动仿真结果与预设仿真结果不匹配,优化所述运动控制策略,包括:
8、若所述运动仿真结果表征所述物料模型在跟随所述物流设备模型的运动过程中发生异常情况,基于所述异常情况,优化所述运动控制策略。
9、在其中一个实施例中,所述物流设备模型包括至少两个设备模型;所述基于所述异常情况,优化所述运动控制策略,包括:
10、在将一个设备模型上的物料模型向另一个设备模型输送的情况下,若所述异常情况包括所输送的物料模型与另一个设备模型上的物料模型之间发生碰撞,调整所述一个设备模型和所述另一个设备模型输送物料模型的速度。
11、在其中一个实施例中,还包括:
12、若所述异常情况包括所输送的物料模型偏离所述另一个设备模型的预设输送方向,调整所述一个设备模型向所述另一个设备模型输送物料模型的方向与所述预设输送方向匹配。
13、在其中一个实施例中,所述物料模型的获取方式,包括下述任意一项:
14、第一项:接收针对表征物料的模型的选择操作,并在对所述模型添加对应的碰撞体组件的情况下,获得所述物料模型;其中,所述碰撞体组件用于将所述物流设备模型与所述物料模型进行关联;
15、第二项:获取物料模型数据,基于所述物料模型数据获得所述物料模型。
16、在其中一个实施例中,还包括:
17、响应于针对所述物流设备模型的参数配置操作,获得所述物流设备模型的输送方向和输送速度;所述运动仿真参数包括所述输送方向和所述输送速度;
18、所述基于所述物流设备模型的运动仿真参数,获得物料模型的运动控制策略,包括:
19、基于所述输送方向和所述输送速度,获得所述物料模型的运动控制策略。
20、第二方面,本申请还提供了一种基于数字孪生的运动仿真装置。所述装置包括:
21、模型获取模块,用于获取设备模型数据,基于所述设备模型数据获得物流设备模型;
22、策略获取模块,用于基于所述物流设备模型的运动仿真参数,获得物料模型的运动控制策略;
23、控制模块,用于基于所述运动控制策略,控制所述物流设备模型对所述物料模型进行运动仿真;
24、优化模块,用于若运动仿真结果与预设仿真结果不匹配,优化所述运动控制策略,以使得基于优化后的运动控制策略所获得的运动仿真结果满足所述预设仿真结果;其中,所述预设仿真结果用于表征所述物流设备模型对所述物料模型的输送过程满足稳定性条件。
25、第三方面,本申请还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
26、获取设备模型数据,基于所述设备模型数据获得物流设备模型;
27、基于所述物流设备模型的运动仿真参数,获得物料模型的运动控制策略;
28、基于所述运动控制策略,控制所述物流设备模型对所述物料模型进行运动仿真;
29、若运动仿真结果与预设仿真结果不匹配,优化所述运动控制策略,以使得基于优化后的运动控制策略所获得的运动仿真结果满足所述预设仿真结果;其中,所述预设仿真结果用于表征所述物流设备模型对所述物料模型的输送过程满足稳定性条件。
30、第四方面,本申请还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
31、获取设备模型数据,基于所述设备模型数据获得物流设备模型;
32、基于所述物流设备模型的运动仿真参数,获得物料模型的运动控制策略;
33、基于所述运动控制策略,控制所述物流设备模型对所述物料模型进行运动仿真;
34、若运动仿真结果与预设仿真结果不匹配,优化所述运动控制策略,以使得基于优化后的运动控制策略所获得的运动仿真结果满足所述预设仿真结果;其中,所述预设仿真结果用于表征所述物流设备模型对所述物料模型的输送过程满足稳定性条件。
35、第五方面,本申请还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
36、获取设备模型数据,基于所述设备模型数据获得物流设备模型;
37、基于所述物流设备模型的运动仿真参数,获得物料模型的运动控制策略;
38、基于所述运动控制策略,控制所述物流设备模型对所述物料模型进行运动仿真;
39、若运动仿真结果与预设仿真结果不匹配,优化所述运动控制策略,以使得基于优化后的运动控制策略所获得的运动仿真结果满足所述预设仿真结果;其中,所述预设仿真结果用于表征所述物流设备模型对所述物料模型的输送过程满足稳定性条件。
40、上述基于数字孪生的运动仿真方法、装置、计算机设备、计算机可读存储介质和计算机程序产品,通过获取设备模型数据,基于设备模型数据获得物流设备模型,并基于物流设备模型的运动仿真参数,获得物料模型的运动控制策略,并基于运动控制策略,控制物流设备模型对物料模型进行运动仿真;若运动仿真结果与预设仿真结果不匹配,优化运动控制策略,以使得基于优化后的运动控制策略所获得的运动仿真结果满足预设仿真结果,预设仿真结果用于表征物流设备模型对物料模型的输送过程满足稳定性条件,因而,在实际物流系统中,基于优化后的运动控制策略构建物流设备与物料之间的输送过程时,可以避免出现物流设备运输物料不稳定的情况,也就不需要对物流设备的输送过程进行调整,可以提高物流效率。
技术特征:
1.一种基于数字孪生的运动仿真方法,其特征在于,所述方法包括:
2.根据权利要求1所述的运动仿真方法,其特征在于,所述若运动仿真结果与预设仿真结果不匹配,优化所述运动控制策略,包括:
3.根据权利要求2所述的运动仿真方法,其特征在于,所述物流设备模型包括至少两个设备模型;所述基于所述异常情况,优化所述运动控制策略,包括:
4.根据权利要求3所述的运动仿真方法,其特征在于,还包括:
5.根据权利要求1所述的运动仿真方法,其特征在于,所述物料模型的获取方式,包括下述任意一项:
6.根据权利要求1所述的运动仿真方法,其特征在于,还包括:
7.一种基于数字孪生的运动仿真装置,其特征在于,所述装置包括:
8.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至6中任一项所述的运动仿真方法的步骤。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至6中任一项所述的运动仿真方法的步骤。
10.一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1至6中任一项所述的运动仿真方法的步骤。
技术总结
本申请涉及一种基于数字孪生的运动仿真方法、装置、计算机设备、存储介质和计算机程序产品。所述方法包括:获取设备模型数据,基于设备模型数据获得物流设备模型;基于物流设备模型的运动仿真参数,获得物料模型的运动控制策略;基于运动控制策略,控制物流设备模型对物料模型进行运动仿真;若运动仿真结果与预设仿真结果不匹配,优化运动控制策略,以使得基于优化后的运动控制策略所获得的运动仿真结果满足预设仿真结果;其中,预设仿真结果用于表征物流设备模型对物料模型的输送过程满足稳定性条件。采用本方法能够提高物流效率。
技术研发人员:程东永,卞振伟,黄坤
受保护的技术使用者:湖南视比特机器人有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!