伺服参数整定方法、计算机设备和存储介质与流程
本申请涉及自动控制,尤其是一种伺服参数整定方法、计算机设备和存储介质。
背景技术:
1、交流伺服系统具有控制精度高,过载能力强,响应速度快的特点,广泛应用于自动化行业的各个领域,如机器人、自动化生产线、数控机床、纺织设备、医疗机械、半导体制造等。但是由于各个领域的应用场景都不相同,传动机构与负载大小相差较大,常见传动机构有:直联传动、丝杆传动、皮带轮传动、齿轮齿条传动等,常见负载惯量比也各不相同。因此,交流伺服驱动器提供了参数设置接口,用户可以根据实际负载状况,响应要求调试参数,以使伺服系统达到一定的响应性与稳定性。然而当前伺服主要调试参数较多,需要有一定经验的工程师花费一定的时间才能调试出一套合适的参数,需要投入的人力成本和时间成本都较高。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够降低人力成本和时间成本的伺服参数整定方法、计算机设备和存储介质。
2、一种伺服参数整定方法,所述方法包括:
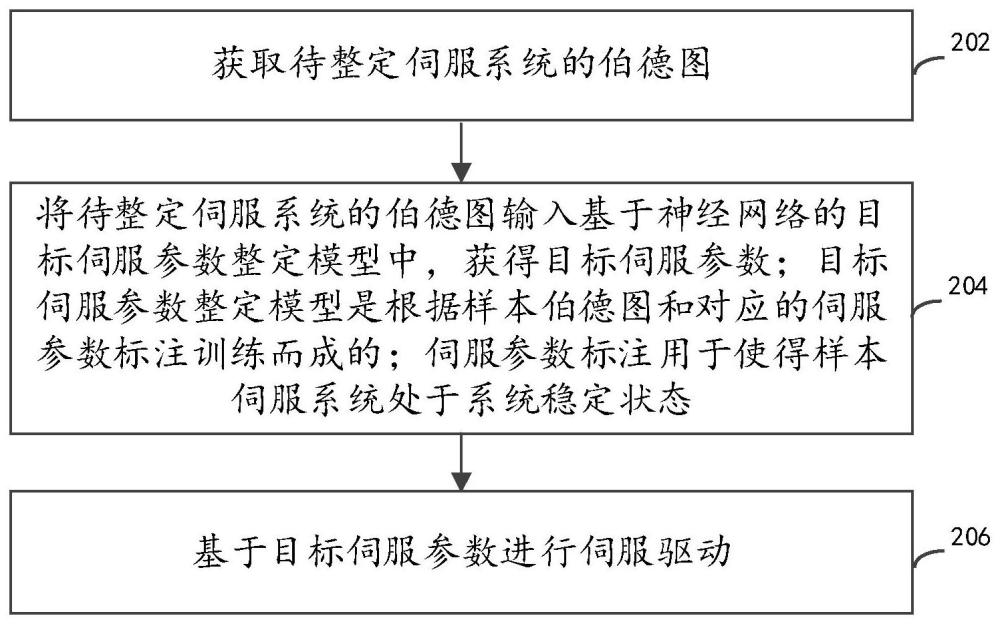
3、获取待整定伺服系统的伯德图;
4、将所述待整定伺服系统的伯德图输入基于神经网络的目标伺服参数整定模型中,获得目标伺服参数;所述目标伺服参数整定模型是根据样本伯德图和对应的伺服参数标注训练而成的;所述伺服参数标注用于使得样本伺服系统处于系统稳定状态;
5、基于所述目标伺服参数进行伺服驱动。
6、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现各伺服参数整定方法实施例的步骤。
7、一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现各伺服参数整定方法实施例的步骤。
8、上述伺服参数整定方法、计算机设备和存储介质,伯德图用于体现系统频率响应特性,包含了很多伺服系统的特征,能够反映伺服系统的某些性能;通过将待整定伺服系统的伯德图输入基于神经网络的目标伺服参数整定模型,获得目标伺服参数,能够得到合理的伺服参数,减少投入的人力成本和时间成本从而降低了伺服参数整定成本,伺服参数准确性高并且伺服系统的稳定性更好。
技术特征:
1.一种伺服参数整定方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述方法还包括:
3.根据权利要求2所述的方法,其特征在于,所述将所述样本伯德图和对应的伺服参数标注输入基于神经网络的伺服参数整定模型中进行训练,直至满足迭代条件,获得所述目标伺服参数整定模型,包括:
4.根据权利要求2所述的方法,其特征在于,所述将所述样本伯德图和对应的伺服参数标注输入基于神经网络的伺服参数整定模型中进行训练,直至满足迭代条件,获得所述目标伺服参数整定模型,包括:
5.根据权利要求1所述的方法,其特征在于,所述样本伯德图包括样本幅频图和样本相频图;所述样本伯德图的获取方式,包括:
6.根据权利要求5所述的方法,其特征在于,所述样本伺服系统的速度指令输入信号设为0,反馈传递函数设为1。
7.根据权利要求1至6任一项所述的方法,其特征在于,所述基于所述目标伺服参数进行伺服驱动,包括:
8.一种伺服参数整定模型的训练方法,其特征在于,所述方法包括:
9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至8中任一项所述的方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至8中任一项所述的方法的步骤。
技术总结
本申请涉及一种伺服参数整定方法、计算机设备和存储介质。所述方法包括:获取待整定伺服系统的伯德图;将所述待整定伺服系统的伯德图输入基于神经网络的目标伺服参数整定模型中,获得目标伺服参数;所述目标伺服参数整定模型是根据样本伯德图和对应的伺服参数标注训练而成的;所述伺服参数标注用于使得样本伺服系统处于系统稳定状态;基于所述目标伺服参数进行伺服驱动。采用本申请的方法能够减少人力成本和时间成本、减小噪音与整定时间以及扩大使用工况。
技术研发人员:请求不公布姓名,请求不公布姓名,请求不公布姓名,请求不公布姓名,请求不公布姓名,请求不公布姓名,请求不公布姓名,请求不公布姓名
受保护的技术使用者:深圳数马电子技术有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!