移动路径的调整方法、终端设备及存储介质与流程
本发明涉及路径规划,尤其涉及一种移动路径的调整方法、终端设备及存储介质。
背景技术:
1、随着科技的不断进步和人工智能的快速发展,自动化和智能化的机器人越来越多地涉足各个领域。人们不断探索机器人技术并将其应用于生产、服务、医疗、教育等各行各业,可以不懈地进行复杂、繁琐或高效的工作。
2、但是,在使用机器人时还存在较多的设置问题,降低机器人的工作效率。以割草机为例,现有技术中对于割草机执行割草任务所依据的路径进行规划时往往需要分步进行调整,例如,先设置路径数值进而根据设置数值生成预览路径以使用户根据预览路径判断是否符合需求,在此过程中需要不断调整数值生成对应的预览路径。此外,对于复杂路径进行规划时若需要规划多条路径,则需要不断传输数据生成数据,进而耗费大量的时间和算力,严重影响了工作效率。
技术实现思路
1、本发明实施例的主要目的在于提供一种移动路径的调整方法、终端设备及存储介质,旨在解决现有路径规划技术中,对于复杂路径进行规划时若需要规划多条路径,则需要不断调整数据、传输数据从而耗费大量的时间,严重影响机器人的工作效率,导致工作效率较低的问题。
2、第一方面,本发明实施例提供一种移动路径的调整方法,包括:
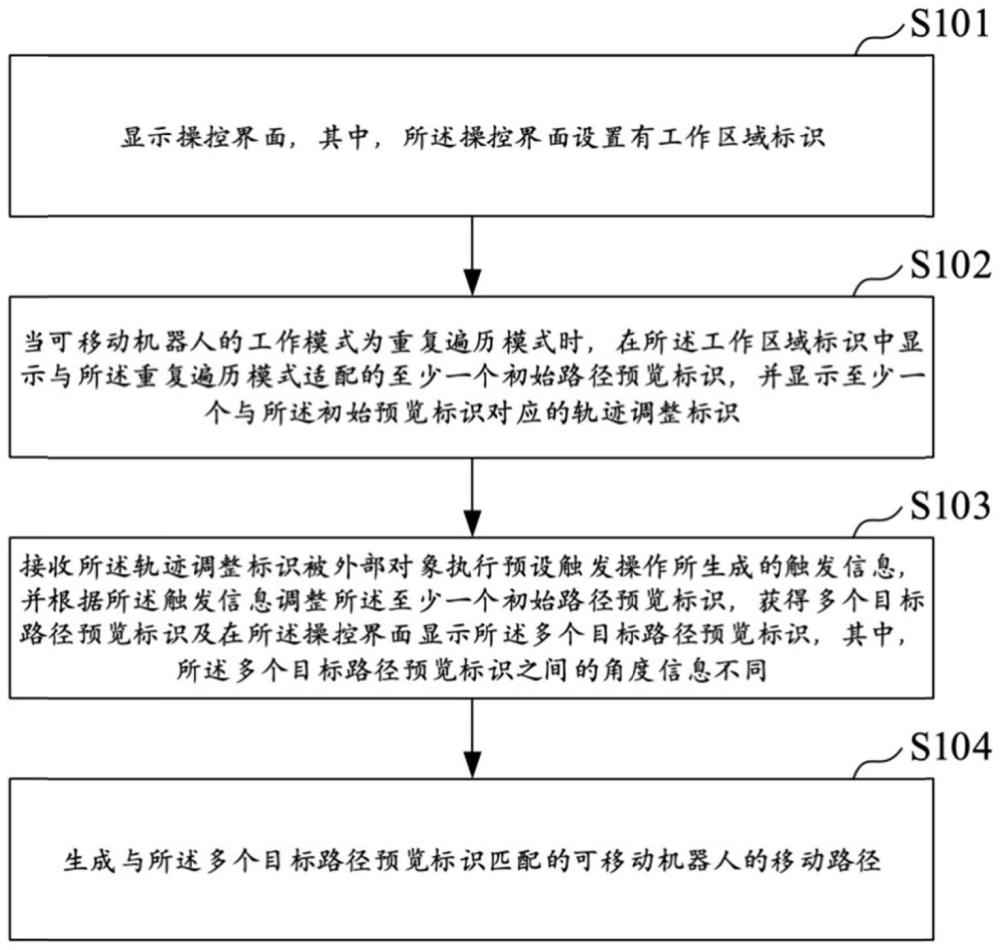
3、显示操控界面,其中,所述操控界面设置有工作区域标识;
4、当可移动机器人的工作模式为重复遍历模式时,在所述工作区域标识中显示与所述重复遍历模式适配的至少一个初始路径预览标识,并显示至少一个与所述初始预览标识对应的轨迹调整标识;
5、接收所述轨迹调整标识被外部对象执行预设触发操作所生成的触发信息,并根据所述触发信息调整所述至少一个初始路径预览标识,获得多个目标路径预览标识及在所述操控界面显示所述多个目标路径预览标识,其中,所述多个目标路径预览标识之间的角度信息不同;
6、生成与所述多个目标路径预览标识匹配的可移动机器人的移动路径。
7、第二方面,本发明实施例还提供一种终端设备,所述终端设备包括处理器、存储器、存储在所述存储器上并可被所述处理器执行的计算机程序以及用于实现所述处理器和所述存储器之间的连接通信的数据总线,其中所述计算机程序被所述处理器执行时,实现如本发明说明书提供的任一项移动路径的调整方法的步骤。
8、第三方面,本发明实施例还提供一种存储介质,用于计算机可读存储,其特征在于,所述存储介质存储有一个或者多个程序,所述一个或者多个程序可被一个或者多个处理器执行,以实现如本发明说明书提供的任一项移动路径的调整方法的步骤。
9、本发明实施例提供一种移动路径的调整方法、终端设备及存储介质,其中,该调整方法包括显示操控界面,其中,操控界面设置有工作区域标识;当可移动机器人的工作模式为重复遍历模式时,在工作区域标识中显示与重复遍历模式适配的至少一个初始路径预览标识,并显示至少一个与初始预览标识对应的轨迹调整标识;接收轨迹调整标识被外部对象执行预设触发操作所生成的触发信息,并根据触发信息调整至少一个初始路径预览标识,获得多个目标路径预览标识及在操控界面显示多个目标路径预览标识,其中,多个目标路径预览标识之间的角度信息不同;生成与多个目标路径预览标识匹配的可移动机器人的移动路径。解决了现有技术中对于复杂路径进行规划时若需要规划多条路径,则需要不断调整数据、传输数据从而耗费大量的时间,严重影响机器人的工作效率,导致工作效率较低的问题。该移动路径的调整方法通过拖拽方式快速实现多个角度调整同时生成并显示对应的调整结果,节省了角度调整过程中不断生成移动路径的算力,提高了路径规划的效率,并且该移动路径的调整方法使得用户在调整过程中可以即时预览角度调整效果,实现了调整结果的可视性,进一步提高了用户体验和路径规划效率。
技术特征:
1.一种移动路径的调整方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述初始路径预览标识包括第一路径预览标识,所述轨迹调整标识包括第一轨迹调整标识;
3.根据权利要求2所述的方法,其特征在于,所述显示所述第二目标路径预览标识之后,还包括:
4.根据权利要求1所述的方法,其特征在于,所述初始路径预览标识至少包括第三路径预览标识和第四路径预览标识,所述轨迹调整标识包括第三轨迹调整标识,且所述第三路径预览标识与第三轨迹调整标识相对应;
5.根据权利要求4所述的方法,其特征在于,所述方法还包括:
6.根据权利要求1所述的方法,其特征在于,所述初始路径预览标识至少包括第五路径预览标识和第六路径预览标识,所述轨迹调整标识包括第五轨迹调整标识和第六轨迹调整标识,且第五路径预览标识与第五轨迹调整标识相对应,第六路径预览标识与第六轨迹调整标识相对应;
7.根据权利要求2-5中任一项所述的方法,其特征在于,所述预设角度差值为90度;
8.根据权利要求1-6中任一项所述的方法,其特征在于,所述显示操控界面之前,所述方法还包括:
9.根据权利要求1-6中任一项所述的方法,其特征在于,所述根据所述触发信息调整所述至少一个初始路径预览标识,获得多个目标路径预览标识,包括:
10.根据权利要求9所述的方法,其特征在于,所述相对位置信息包括相对角度信息,所述根据所述触发信息确定所述轨迹调整标识与预设参考位置之间的相对位置信息,包括:
11.根据权利要求1-6中任一项所述的方法,其特征在于,不同的所述初始路径预览标识设置的标识属性不同,所述标识属性包括标识颜色、标识宽度、标识的线条样式。
12.根据权利要求1-6中任一项所述的方法,其特征在于,所述初始路径预览标识在所述工作区域标识中显示。
13.根据权利要求1-6中任一项所述的方法,其特征在于,所述方法还包括:
14.根据权利要求1-6中任一项所述的方法,其特征在于,所述生成与所述多个目标路径预览标识匹配的可移动机器人的移动路径,包括:
15.根据权利要求1-6中任一项所述的方法,其特征在于,所述方法还包括:
16.根据权利要求15所述的方法,其特征在于,所述工作信息至少包括所述工作区域标识对应的真实面积信息、所述可移动机器人在所述工作区域标识中工作时对应的耗时信息、工作模式信息以及所述初始路径预览标识之间的预设角度差值中的一项或多项。
17.根据权利要求10所述的方法,其特征在于,所述预设参考位置为所述工作区域标识的中心位置,或者,所述预设参考位置为所述操控界面的中心位置。
18.根据权利要求1所述的方法,其特征在于,所述生成与所述多个目标路径预览标识匹配的可移动机器人的移动路径之后,所述方法还包括:
19.根据权利要求1所述的方法,其特征在于,所述操控界面还设置有功能标识,所述方法还包括:
20.根据权利要求19所述的方法,其特征在于,所述显示位置在所述触发信息对应的目标位置与预设参考位置之间连接线上。
21.一种终端设备,其特征在于,所述终端设备包括处理器、存储器;
22.一种计算机存储介质,用于计算机存储,其特征在于,所述计算机存储介质存储有一个或者多个程序,所述一个或者多个程序可被一个或者多个处理器执行,以实现权利要求1至20中任一项所述的移动路径的调整方法的步骤。
技术总结
本发明实施例提供一种移动路径的调整方法、终端设备及存储介质,属于路径规划领域。该方法包括:显示操控界面,操控界面设置有工作区域标识;当可移动机器人的工作模式为重复遍历模式时,在工作区域标识中显示与重复遍历模式适配的至少一个初始路径预览标识,并显示至少一个与初始预览标识对应的轨迹调整标识;接收轨迹调整标识被外部对象执行预设触发操作所生成的触发信息,并根据触发信息调整至少一个初始路径预览标识,获得多个目标路径预览标识及在操控界面显示多个目标路径预览标识,多个目标路径预览标识之间的角度信息不同;生成与多个目标路径预览标识匹配的可移动机器人的移动路径。提高了可移动机器人进行路径规划的效率和用户体验。
技术研发人员:魏基栋,陈建林
受保护的技术使用者:深圳库犸科技有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!