一种智能密集柜的编组控制方法与流程
本发明属于智能密集柜领域,具体涉及一种智能密集柜的编组控制方法。
背景技术:
1、智能密集柜一般都具备电机驱动的自动开闭功能,通常的控制方法是将一列柜体逐一移动直到待打开的柜体开放为止,如果智能密集柜的队列中柜体数量多,当从队列首端开始逐个移动,到最后打开位于队列末端的目标柜体时,耗时非常长,并且为了保证智能密集柜在装载资料物品后能够顺利打开,通常配备的电机功率较高,因此逐个移动柜体的过程电力消耗也较大。
技术实现思路
1、本发明为了解决上述现有技术中存在的问题,本发明提供了一种智能密集柜的编组控制方法,能够减少智能密集柜控制过程中的电机启动数量,节约打开所需的等待时间,降低电力消耗。
2、本发明采用的具体技术方案是:
3、一种智能密集柜的编组控制方法,包括如下步骤:
4、s1、对轨道上的实体柜体进行第一编号;
5、s2、将轨道的剩余长度按照预设宽度划分为用来代表通道的虚拟柜体,并对虚拟柜体进行第二编号;
6、s3、将轨道上的实体柜体与虚拟柜体的第一编号及第二编号按顺序存储为当前序列;
7、s4、接收用户指定的待开实体柜体的第一编号;
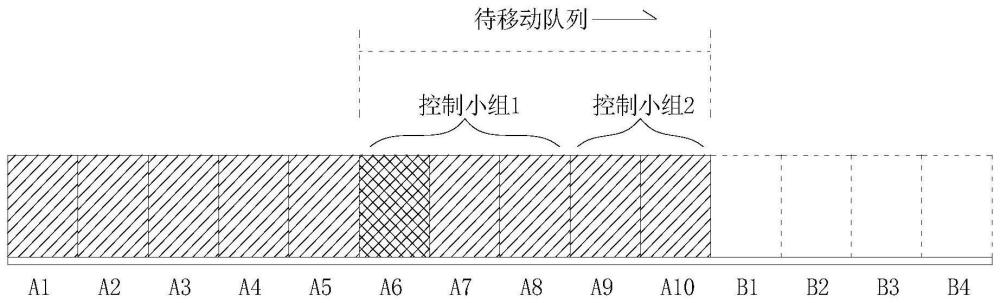
8、s5、在当前序列中,获取此时可用虚拟柜体的第二编号,可用虚拟柜体与待开实体柜体之间的柜组序列为待移动队列,确定待移动队列中的各柜体编号;
9、s6、按柜体编号驱动待移动队列移动,位于待移动队列尾部的可用虚拟柜体位置被压缩,在待移动队列首端形成新的虚拟柜体,完成智能密集柜的移动。
10、若待移动队列中均为实体柜体,则将待移动队列按照预设参数分为控制小组,每个控制小组中沿移动方向后侧的柜体上电驱动,推动本组中的其他柜组沿移动方向平移。
11、若待移动队列中包括实体柜体和虚拟柜体,则首先按照虚拟柜体所在待移动队列的位置,将待移动队列分割为第二队列组,第二队列组中的每个队列再按照预设参数分为控制小组,每个控制小组中仅移动方向后侧的柜体上电驱动,推动该控制小组中的其他柜体沿移动方向平移。
12、所述预设参数为用户预设的柜体数量值,或者为柜体重量参数。
13、所述控制小组的控制方法为,实体柜体的驱动电机按照移动方向上电正转或反转,当实体柜体移动的距离等于设定的虚拟柜体宽度时停止移动,相邻的控制小组上电驱动时间延迟t秒。
14、所述若相邻的控制小组之间夹有虚拟柜体,则延迟t=0s。
15、本发明的有益效果是:
16、本发明采用对待移动队列进行再次编组的方式,将待移动队列分割为多个控制小组,每个控制小组借助位于尾端的柜体推动整体移动,节约了操作时间,减少了一次移动电机启动的数量,有助于节约打开所需的等待时间,而通过虚拟柜体的设置,使得已经打开的柜体通道能够在智能密集柜打开其他通道时得到保留,方便用户使用。
技术特征:
1.一种智能密集柜的编组控制方法,其特征在于:包括如下步骤:
2.根据权利要求1所述的方法,其特征在于:若待移动队列中均为实体柜体,则将待移动队列按照预设参数分为控制小组,每个控制小组中沿移动方向后侧的柜体上电驱动,推动本组中的其他柜组沿移动方向平移。
3.根据权利要求1所述的方法,其特征在于:若待移动队列中包括实体柜体和虚拟柜体,则首先按照虚拟柜体所在待移动队列的位置,将待移动队列分割为第二队列组,第二队列组中的每个队列再按照预设参数分为控制小组,每个控制小组中仅移动方向后侧的柜体上电驱动,推动该控制小组中的其他柜体沿移动方向平移。
4.根据权利要求1所述的方法,其特征在于:所述预设参数为用户预设的柜体数量值,或者为柜体重量参数。
5.根据权利要求2或3所述的方法,其特征在于:所述控制小组的控制方法为,实体柜体的驱动电机按照移动方向上电正转或反转,当实体柜体移动的距离等于设定的虚拟柜体宽度时停止移动,相邻的控制小组上电驱动时间延迟t秒。
6.根据权利要求5所述的方法,其特征在于:所述若相邻的控制小组之间夹有虚拟柜体,则延迟t=0s。
技术总结
本发明属于智能密集柜领域,具体涉及一种智能密集柜的编组控制方法,包括如下步骤:对实体柜体进行第一编号;预设虚拟柜体,并对虚拟柜体进行第二编号;将实体柜体与虚拟柜体按顺序存储为当前序列;接收用户指定的待开实体柜体的第一编号;确定待移动队列中的各柜体编号;按柜体编号驱动待移动队列移动,位于待移动队列尾部的可用虚拟柜体位置被压缩,完成智能密集柜的移动。本发明将待移动队列分割为多个控制小组,每个控制小组借助位于尾端的柜体推动整体移动,减少了一次移动电机启动的数量,有助于节约打开所需的等待时间,而通过虚拟柜体的设置,使得已经打开的柜体通道能够在智能密集柜打开其他通道时得到保留,方便用户使用。
技术研发人员:肖泽佳
受保护的技术使用者:河北德为智联科技集团有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!