非接触式的设备控制系统、方法、电子设备及存储介质与流程
本发明实施例涉及设备控制,尤其涉及一种非接触式的设备控制系统、方法、装置、电子设备及存储介质。
背景技术:
1、非接触式控制是指无需使用者实际接触电子设备,即可实现对电子设备操控的控制方式。由于非接触式控制对使用者与电子设备之间的相对位置受限较小,更符合使用者的便捷操控需求,是一种方便、操控灵活性较强的控制方式,被广泛应用于智能家居、智慧生活以及智能办公等各个领域。
2、目前,非接触式控制通常包括两种实现方式,一种是通过摄像头的拍摄内容进行分析以识别物体的控制姿势,从而通过图像识别的方式完成相应的触控操作。另外一种是基于一组信号发射组件和信号接收组件确定物体在感应区域内的位置和控制姿势等,从而完成相应的触控操作。
3、发明人在实现本发明的过程中,发现现有技术存在如下缺陷:基于图像识别的方式进行非接触式控制,不仅对图像采集的环境光线要求较高,而且图像识别的算法较为复杂,对硬件系统的要求较高。而基于单一的信号发射组件和信号接收组件进行非接触式控制,对物体姿势识别的准确率较低,且误识别率较高,难以保证物体姿势的真实意图。
技术实现思路
1、本发明实施例提供一种非接触式的设备控制系统、方法、电子设备及存储介质,能够提高非接触式设备控制的识别精度,降低非接触式设备控制的误识别率,提高非接触式设备控制的准确率。
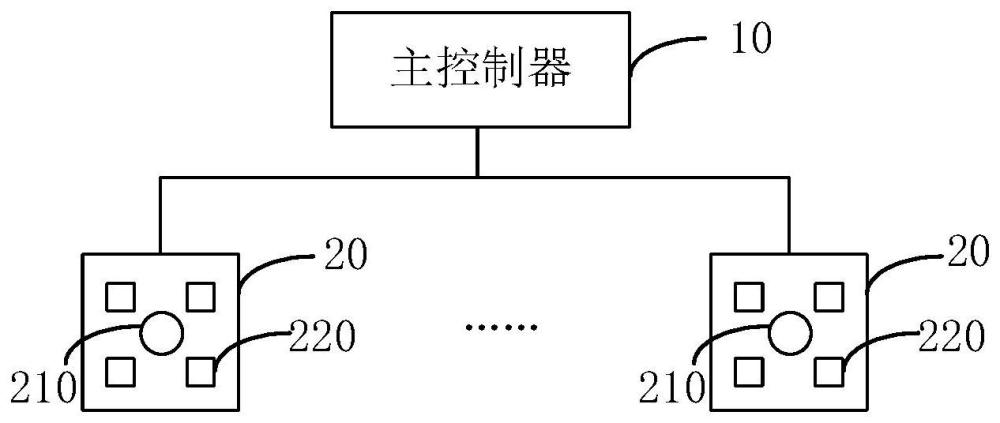
2、根据本发明的一方面,提供了一种非接触式的设备控制系统,包括主控制器和至少一个功能控制子系统,所述主控制器和所述功能控制子系统通信连接,所述功能控制子系统包括信号发射器和多个信号接收器,各所述信号接收器在所述功能控制子系统的部署结构上规则排列;其中:
3、所述信号发射器用于向操作用户位于感应区域范围内的操作对象发射第一信号;
4、所述信号接收器用于接收所述第一信号经所述操作对象反射生成的第二信号;
5、所述主控制器用于接收各所述第二信号,根据各所述第二信号计算所述操作对象的当前状态,并在确定所述操作对象的当前状态满足功能触发条件的情况下,触发所述功能控制子系统对应的设备功能。
6、根据本发明的另一方面,提供了一种非接触式的设备控制方法,应用于非接触式的设备控制系统的主控制器,所述方法包括:
7、接收功能控制子系统中多个信号接收器反馈的第二信号;其中,所述信号接收器在所述功能控制子系统的部署结构上规则排列;
8、根据各所述第二信号计算所述操作对象的当前状态;
9、在确定所述操作对象的当前状态满足功能触发条件的情况下,触发所述功能控制子系统对应的设备功能。
10、根据本发明的另一方面,提供了一种非接触式的设备控制装置,配置于非接触式的设备控制系统的主控制器,包括:
11、第二信号接收模块,用于接收功能控制子系统中多个信号接收器反馈的第二信号;其中,所述信号接收器在所述功能控制子系统的部署结构上规则排列;
12、当前状态计算模块,用于根据各所述第二信号计算所述操作对象的当前状态;
13、设备功能触发模块,用于在确定所述操作对象的当前状态满足功能触发条件的情况下,触发所述功能控制子系统对应的设备功能。
14、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
15、至少一个处理器;以及
16、与所述至少一个处理器通信连接的存储器;其中,
17、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的非接触式的设备控制方法。
18、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的非接触式的设备控制方法。
19、本发明实施例通过主控制器和至少一个功能控制子系统构成一种非接触式的设备控制系统,该系统中的功能控制子系统包括信号发射器和多个信号接收器,且各信号接收器在功能控制子系统的部署结构上规则排列。其中,功能控制子系统中的信号发射器用于向操作用户位于感应区域范围内的操作对象发射第一信号,信号接收器则用于接收第一信号经操作对象反射生成的第二信号。主控制器可以接收各第二信号,根据各第二信号计算操作对象的当前状态,并在确定操作对象的当前状态满足功能触发条件的情况下,触发功能控制子系统对应的设备功能。由于多个规则排列的信号接收器可以获取多个规则的第二信号,因此,主控制器可以基于多个规则的第二信号精确计算操作对象的当前状态,从而解决现有非接触式的设备控制系统存在的因误识别率高导致识别精度较差等问题,能够提高非接触式设备控制的识别精度,降低非接触式设备控制的误识别率,提高非接触式设备控制的准确率。
20、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种非接触式的设备控制系统,其特征在于,包括主控制器和至少一个功能控制子系统,所述主控制器和所述功能控制子系统通信连接,所述功能控制子系统包括信号发射器和多个信号接收器,各所述信号接收器在所述功能控制子系统的部署结构上规则排列;其中:
2.根据权利要求1所述的系统,其特征在于,所述操作对象的当前状态包括所述操作对象与所述功能控制子系统的部署结构之间的相对距离和相对位置;所述主控制器具体用于:
3.根据权利要求2所述的系统,其特征在于,所述信号接收器包括中心信号接收器和多个周边信号接收器,所述中心信号接收器位于所述功能控制子系统的部署结构的中间区域,所述周边信号接收器位于所述功能控制子系统的部署结构的周边区域,且各所述周边信号接收器规则排列。
4.根据权利要求3所述的系统,其特征在于,所述主控制器具体用于:
5.根据权利要求1所述的系统,其特征在于,所述操作对象的当前状态还包括所述操作对象的当前姿势;所述主控制器还用于:
6.根据权利要求1所述的系统,其特征在于,所述功能控制子系统还包括超声波发生器,所述非接触式的设备控制系统还包括检测传感器;其中:
7.根据权利要求6所述的系统,其特征在于,所述功能控制子系统还包括信号处理器,所述信号处理器与各所述信号接收器通信连接,并与所述主控制器通信连接,用于:
8.一种非接触式的设备控制方法,其特征在于,应用于非接触式的设备控制系统的主控制器,所述方法包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求8所述的非接触式的设备控制方法。
技术总结
本发明实施例公开了一种非接触式的设备控制系统、方法、电子设备及存储介质,其中,系统包括主控制器和至少一个功能控制子系统,主控制器和功能控制子系统通信连接,功能控制子系统包括信号发射器和多个信号接收器,各信号接收器在功能控制子系统的部署结构上规则排列;信号发射器用于向操作用户位于感应区域范围内的操作对象发射第一信号;信号接收器用于接收第一信号经操作对象反射生成的第二信号;主控制器用于接收各第二信号,根据各第二信号计算操作对象的当前状态,并在确定操作对象的当前状态满足功能触发条件的情况下,触发功能控制子系统对应的设备功能。本发明实施例的技术方案能够提高非接触式设备控制的准确率。
技术研发人员:景涛,孙伟勇,梁玥华
受保护的技术使用者:浙江亿田智能厨电股份有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!