基于增强未知动态估计器的外骨骼机器人变导纳控制方法
本发明涉及一种基于增强未知动态估计器的外骨骼机器人变导纳控制方法,属于下肢外骨骼机器人控制。
背景技术:
1、下肢外骨骼机器人是一种集成了测试技术、控制技术和机电一体化技术的可穿戴设备,它通过模拟人类的日常活动,帮助用户进行康复训练。下肢外骨骼机器人的控制性能对于提高康复效果至关重要。然而,目前市场上的一些下肢外骨骼设备,仅通过预编程的轨迹来辅助用户行走,这在整个训练周期中可能无法适应用户的需求,尤其是对于那些在康复中后期已经恢复部分行走能力的用户。为了提高柔顺性,降低运动过程中的人机交互力矩是关键。如何测量并通过控制降低人机交互力矩,是提高下肢外骨骼柔顺性的重要因素之一。然而,使用多维力传感器进行测量不仅会增加设备的经济成本,还会使得传感器与用户之间的交互变得复杂。因此,需要寻找一种既能准确测量人机交互力矩,又能降低成本和复杂性的方法。
2、不同学者采用了不同方式来提高运动的柔顺性,因此,许多学者在下肢外骨骼中引入弹性串联驱动器(sea)或阻抗/导纳控来提高运动的柔顺性。虽然sea提高了柔顺性,但它也使外骨骼结构更加复杂,这反过来又使控制变得更加困难,成本更高。而导纳控制等更为简单,但固定系数的阻抗/导纳控制提高柔顺性有限,因此如何变导纳控制来保证穿戴者在不同步态下运动柔顺性十分关键。传统的估计器通常需要调整多个参数,并且难以嵌入到控制器中,因此其应用并未广泛推广。
3、有鉴于此,特提出本发明。
技术实现思路
1、本发明提供了一种基于增强未知动态估计器的外骨骼机器人变导纳控制方法,以用于设计基于增强未知动态估计器的变导纳控制器,利用该变导纳控制器能够有效地执行基于人体运动意图生成的参考轨迹。
2、本发明的技术方案是:
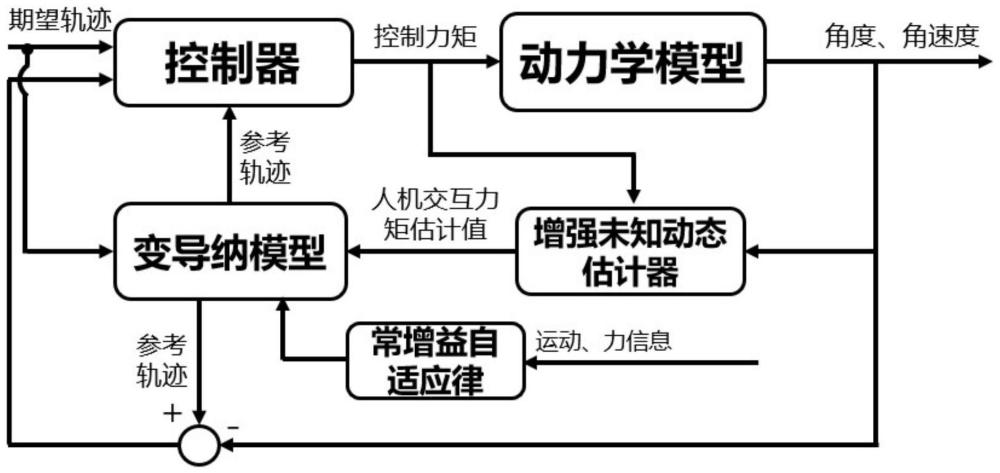
3、根据本发明的第一方面,提供了一种基于增强未知动态估计器的外骨骼机器人变导纳控制方法,包括:建立髋关节外骨骼机器人动力学模型;对髋关节外骨骼机器人动力学模型进行重构,获得第二重构髋关节外骨骼机器人动力学模型;依据第二重构髋关节外骨骼机器人动力学模型设计髋关节外骨骼的增强未知动态估计器来估计人机交互力矩;将人机交互力矩估计值带入导纳模型中,并估计得到导纳模型中的刚度系数;获取参考轨迹;依据人机交互力矩估计值及参考轨迹,设计基于增强未知动态估计器的变导纳控制器。
4、所述对髋关节外骨骼机器人动力学模型进行重构,获得第二重构髋关节外骨骼机器人动力学模型,包括:依据辅助变量,对髋关节外骨骼机器人动力学模型进行重构,获得第一重构髋关节外骨骼机器人动力学模型;依据第一重构髋关节外骨骼机器人动力学模型进行一阶低通滤波,获得第二重构髋关节外骨骼机器人动力学模型。
5、所述依据第一重构髋关节外骨骼机器人动力学模型进行一阶低通滤波,获得第二重构髋关节外骨骼机器人动力学模型,具体表达式为:
6、(ff1-ff)/(k-k1)+hf=τf+εf;
7、其中,ff1、ff为经过一阶低通滤波后的形式且满足两者采用不同的滤波系数参与滤波,前者采用滤波系数k1,后者采用滤波系数k;hf、τf和εf分别为τ和τim经过一阶低通滤波后的形式,采用滤波系数k;k>0,k1>0为滤波系数且k>k1;均为辅助变量;τ为髋关节外骨骼关节电机的控制力矩矢量;τim为人机交互力矩。
8、所述依据第二重构髋关节外骨骼机器人动力学模型设计髋关节外骨骼的增强未知动态估计器,具体表达式为:
9、
10、其中,表示人机交互力矩估计值;ff1、ff为经过一阶低通滤波后的形式且满足两者采用不同的滤波系数参与滤波,前者采用滤波系数k1,后者采用滤波系数k;hf、τf和εf分别为τ和τim经过一阶低通滤波后的形式,采用滤波系数k;k>0,k1>0为滤波系数且k>k1;均为辅助变量;τ为髋关节外骨骼关节电机的控制力矩矢量;τim为人机交互力矩。
11、所述将人机交互力矩估计值带入导纳模型中,并估计得到导纳模型中的刚度系数,包括:定义理想导纳模型;将理想导纳模型修改为状态空间方程;根据状态空间方程,获得修改后的理想导纳模型;将修改后的理想导纳模型进行一阶低通滤波操作;依据不变流形设计常增益自适应律来估计刚度系数。
12、所述常增益自适应律:
13、
14、其中,π为学习增益常数,κ表示调节参数;n1为中间回归向量,h1为辅助变量,α(t)是待估计的未知刚度系数。
15、所述获取参考轨迹,具体表达式为:
16、qr(t+δt)=qr(t)-lz(t)
17、其中,t为自适应的当前时间,δt为自适应的恒定时间间隔;在初始时刻t0,参考轨迹被初始化为期望轨迹,即qr(t0)=qd(t0);l是使参考轨迹收敛的常数项,z(t)为中间变量。
18、所述依据人机交互力矩估计值及参考轨迹,设计基于增强未知动态估计器的变导纳控制器,具体表达式为:
19、
20、其中,τ为髋关节外骨骼关节电机的控制力矩矢量;z1为依据参考轨迹定义的跟踪控制变量;z2为状态误差;k2是控制器增益;为辅助变量;m是髋关节外骨骼机器人的惯性矩阵;表示人机交互力矩估计值;α1为虚拟控制量。
21、根据本发明的第二方面,提供了一种基于增强未知动态估计器的外骨骼机器人变导纳控制装置,包括:建立模块,用于建立髋关节外骨骼机器人动力学模型;第一获得模块,用于对髋关节外骨骼机器人动力学模型进行重构,获得第二重构髋关节外骨骼机器人动力学模型;估计模块,用于依据第二重构髋关节外骨骼机器人动力学模型设计髋关节外骨骼的增强未知动态估计器来估计人机交互力矩;第二获得模块,用于将人机交互力矩估计值带入导纳模型中,并估计得到导纳模型中的刚度系数;获取模块,用于获取参考轨迹;设计模块,用于依据人机交互力矩估计值及参考轨迹,设计基于增强未知动态估计器的变导纳控制器。
22、根据本发明的第三方面,提供了一种处理器,所述处理器用于执行操作,所述操作包括执行上述中任意一项所述的基于增强未知动态估计器的外骨骼机器人变导纳控制方法。
23、本发明的有益效果是:
24、1、通过引入变导纳控制,提高了髋关节外骨骼运动柔顺性能力。
25、2、能实现人机交互力矩的估计误差和跟踪误差同时收敛,从而增强髋关节外骨骼控制系统的鲁棒性。
26、3、实现髋关节外骨骼机器人的跟踪控制,降低了整体设备成本。
27、4、避免使用加速度信号,从而降低了整体的计算量。
技术特征:
1.一种基于增强未知动态估计器的外骨骼机器人变导纳控制方法,其特征在于,包括:
2.根据权利要求1所述的基于增强未知动态估计器的外骨骼机器人变导纳控制方法,其特征在于,所述对髋关节外骨骼机器人动力学模型进行重构,获得第二重构髋关节外骨骼机器人动力学模型,包括:
3.根据权利要求2所述的基于增强未知动态估计器的外骨骼机器人变导纳控制方法,其特征在于,所述依据第一重构髋关节外骨骼机器人动力学模型进行一阶低通滤波,获得第二重构髋关节外骨骼机器人动力学模型,具体表达式为:
4.根据权利要求1所述的基于增强未知动态估计器的外骨骼机器人变导纳控制方法,其特征在于,所述依据第二重构髋关节外骨骼机器人动力学模型设计髋关节外骨骼的增强未知动态估计器,具体表达式为:
5.根据权利要求1所述的基于增强未知动态估计器的外骨骼机器人变导纳控制方法,其特征在于,所述将人机交互力矩估计值带入导纳模型中,并估计得到导纳模型中的刚度系数,包括:
6.根据权利要求5所述的基于增强未知动态估计器的外骨骼机器人变导纳控制方法,其特征在于,所述常增益自适应律:
7.根据权利要求1所述的基于增强未知动态估计器的外骨骼机器人变导纳控制方法,其特征在于,所述获取参考轨迹,具体表达式为:
8.根据权利要求1所述的基于增强未知动态估计器的外骨骼机器人变导纳控制方法,其特征在于,所述依据人机交互力矩估计值及参考轨迹,设计基于增强未知动态估计器的变导纳控制器,具体表达式为:
9.一种基于增强未知动态估计器的外骨骼机器人变导纳控制装置,其特征在于,包括:
10.一种处理器,其特征在于,所述处理器用于执行操作,所述操作包括执行权利要求1-8中任意一项所述的基于增强未知动态估计器的外骨骼机器人变导纳控制方法。
技术总结
本发明公开了一种基于增强未知动态估计器的外骨骼机器人变导纳控制方法,包括:建立髋关节外骨骼机器人动力学模型;对髋关节外骨骼机器人动力学模型进行重构,获得第二重构髋关节外骨骼机器人动力学模型;依据第二重构髋关节外骨骼机器人动力学模型设计髋关节外骨骼的增强未知动态估计器来估计人机交互力矩;将人机交互力矩观测值带入导纳模型中,并估计得到导纳模型中的刚度系数;获取参考轨迹;依据人机交互力矩估计值及参考轨迹,设计基于增强未知动态估计器的变导纳控制器。本发明能提高髋关节外骨骼运动柔顺性能力,增强髋关节外骨骼控制系统的鲁棒性,避免使用加速度信号。实现髋关节外骨骼机器人的跟踪控制,降低了整体设备成本。
技术研发人员:那靖,吕涛,邢亚珊,陆声,高贯斌,李维朝,周健
受保护的技术使用者:昆明理工大学
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!