全地形车振动控制及自平衡方法与流程
本发明涉及全地形车领域,具体的说涉及到一种全地形车振动控制及自平衡方法。
背景技术:
1、全地形车(机器人)在驾驶过程中的颠簸振动通常来源于凹凸不平的路面轮廓或发动机等转动部件的运动冲击,而路面崎岖度在其中占据主导作用。如今振动抑制已被广泛应用于改善车辆的乘坐舒适性,路面冲击通过车辆部件进行传递,进而引起驾驶员对车辆振动的感知。
2、振动对全地形车(机器人)以及乘客的危害主要表现为以下几个方面:1)能量损耗增加,动力传动系统的传递效率大大降低;2)直接损害电机、传动轴、万向节等部件,降低了这些部件的使用寿命;3)由于振动产生即为引发噪声,污染环境的同时降低乘客的乘坐舒适性;4)由于纵向抖动频率在2-10hz左右,与人体器官的跳动频率相似,会极大的危害人体健康。目前采用的振动控制方法大多是被动控制或者半主动控制的方式,采用结构参数优化、隔振材料、扭转弹簧、双质量飞轮以及橡胶减振器等方式,安装过程复杂结构易老化,并且这些方式的抑振效果并不理想。
技术实现思路
1、为了克服现有技术的不足,本发明提供一种全地形车振动控制及自平衡方法,该方法可以降低全地形车行驶过程中的振动,提高全地形车的乘坐舒适性。
2、本发明解决其技术问题所采用的技术方案是:一种全地形车振动控制及自平衡方法,该方法包括以下步骤:
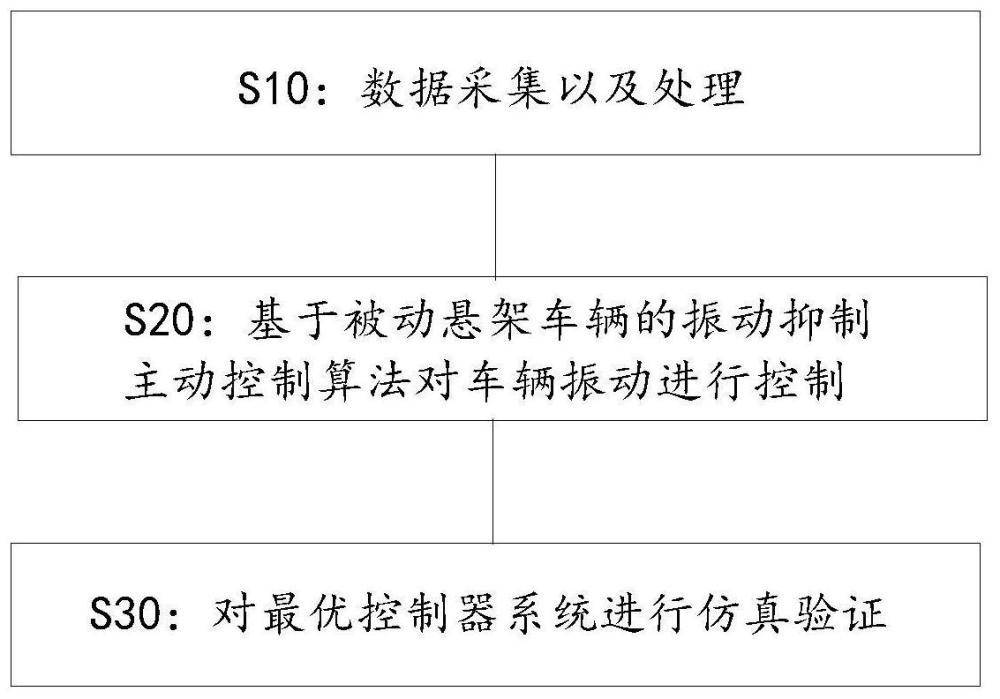
3、步骤s10:数据采集以及处理,对振动传感器的模拟电信号以及转速信号进行采集并将模拟电信号以及转速信号转换为数字信号,读取转换后的数字信号;
4、步骤s20:基于被动悬架车辆的振动抑制主动控制算法对车辆振动进行控制;
5、步骤s201:通过线性二次型方法设计最优控制器系统,并定义系统状态空间向量;
6、步骤s202:对最优控制器系统进行性能指标最小化;
7、步骤s203:检验最优控制器系统的可控性;
8、步骤s204:对最优控制器系统的可控性进行分析求解;
9、步骤s30:对最优控制器系统进行仿真验证。
10、在上述的方法中,所述步骤s201中定义系统状态空间向量为:x=[vx,xz,vz];
11、控制输入和控制输出定义为u=ax和y=vx;其中ax和xz分别表示车辆的纵向加速度和垂直位移,vx和vz分别表示车辆的纵向和垂向速度。
12、在上述的方法中,所述步骤s202中对最优控制器系统进行性能指标最小化的性能指标函数为:
13、
14、其中q表示半正定对角系数矩阵,r表示对称正定系数矩阵。
15、在上述的方法中,所述步骤s202中通过q和r对变量进行加权,使被积函数两部分具有不同的指标占比。
16、在上述的方法中,所述步骤s201中对全地形车纵向和垂向之间的运动学关系进行建模,得到状态空间方程:
17、
18、y=cx;
19、其中x代表状态空间向量,y和u分别代表控制输出和输入,w表示系统扰动,a、b、c和γ表示控制器系数矩阵。
20、在上述的方法中,所述步骤s201中轮胎减速力矩输出设定约束范围为[0,1000]。
21、在上述的方法中,所述步骤s203中检验最优控制器系统的可控性的系数矩阵为:
22、rank[b ab a2b]。
23、在上述的方法中,所述步骤s10中使用a/d转换电路将模拟电信号以及转速信号转换为数字信号。
24、在上述的方法中,所述步骤s10中采集到的模拟电信号以及转速信号高于a/d转换器的输入信号信噪。
25、本发明的有益效果是:该方法可以降低全地形车行驶过程中的振动,提高全地形车的乘坐舒适性。
技术特征:
1.一种全地形车振动控制及自平衡方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的一种全地形车振动控制及自平衡方法,其特征在于,所述步骤s201中定义系统状态空间向量为:x=[vx,xz,vz];
3.根据权利要求1所述的一种全地形车振动控制及自平衡方法,其特征在于,所述步骤s202中对最优控制器系统进行性能指标最小化的性能指标函数为:
4.根据权利要求3所述的一种全地形车振动控制及自平衡方法,其特征在于,所述步骤s202中通过q和r对变量进行加权,使被积函数两部分具有不同的指标占比。
5.根据权利要求2所述的一种全地形车振动控制及自平衡方法,其特征在于,所述步骤s201中对全地形车纵向和垂向之间的运动学关系进行建模,得到状态空间方程:
6.根据权利要求2所述的一种全地形车振动控制及自平衡方法,其特征在于,所述步骤s201中轮胎减速力矩输出设定约束范围为[0,1000]。
7.根据权利要求5所述的一种全地形车振动控制及自平衡方法,其特征在于,所述步骤s203中检验最优控制器系统的可控性的系数矩阵为:
8.根据权利要求1所述的一种全地形车振动控制及自平衡方法,其特征在于,所述步骤s10中使用a/d转换电路将模拟电信号以及转速信号转换为数字信号。
9.根据权利要求1所述的一种全地形车振动控制及自平衡方法,其特征在于,所述步骤s10中采集到的模拟电信号以及转速信号高于a/d转换器的输入信号信噪。
技术总结
本发明公开了一种全地形车振动控制及自平衡方法,该方法包括以下步骤:步骤S10:数据采集以及处理,对振动传感器的模拟电信号以及转速信号进行采集并将模拟电信号以及转速信号转换为数字信号,读取转换后的数字信号;步骤S20:基于被动悬架车辆的振动抑制主动控制算法对车辆振动进行控制;步骤S201:通过线性二次型方法设计最优控制器系统,并定义系统状态空间向量;步骤S202:对最优控制器系统进行性能指标最小化;步骤S203:检验最优控制器系统的可控性;步骤S204:对最优控制器系统的可控性进行分析求解;步骤S30:对最优控制器系统进行仿真验证。本发明的有益效果是:该方法可以降低全地形车行驶过程中的振动,提高车辆的乘坐舒适性。
技术研发人员:谢小辉,于道林,李玉莹,李晓
受保护的技术使用者:深圳航天工业技术研究院有限公司
技术研发日:
技术公布日:2024/8/27
- 还没有人留言评论。精彩留言会获得点赞!