车辆泊车过程中横纵向控制参数更新调整方法、装置、设备和介质与流程
本发明涉及车辆驾驶安全,尤其涉及一种车辆泊车过程中横纵向控制参数更新调整方法。
背景技术:
1、智能车辆泊车横纵向的控制依赖于mpc、lqr、pid等控制方法,这些方法中的关键参数极大地影响车辆控制效果,因此前述控制方法关键参数的更新调整对于智能车辆泊车开发至关重要;现有技术中,智能车辆泊车横纵向控制关键参数的更新调整通常是两种途径,第一个途径是工程人员直接在实际车辆上依据控制效果不断更新调整,严重依赖于大量的实际车辆资源,第二个途径是通过大量的第三方试验获得实际车辆复杂的参数(如侧偏刚度、转向系统特性参数、驱动系统特性参数等),然后依据这些参数建立实际车辆的仿真动力学模型,在仿真动力学模型基础上仿真测试,继而更新调整控车参数,这种方式既耗时也需要消耗大量的经济资源,泊车控制不准确,且拖慢开发进度,严重浪费时间成本与人力资源,且在无法获得这些资源的情况下,将难以开展有效的实际车辆控制参数更新调整,无法获得大致可用的控车参数。
技术实现思路
1、有鉴于此,本发明提供一种车辆泊车过程中横纵向控制参数更新调整方法、装置、设备和介质,能够实现实际车辆的动力学真实响应模拟,将使得多工程人员可同时在pc端完成控车参数更新调整,获得大致的控车参数,既减少实际车辆资源的依赖,又避免浪费人力资源与时间成本,且使得泊车控制更加准确。
2、根据本发明的一方面,本发明实施例提供了一种车辆泊车过程中横纵向控制参数更新调整方法,所述方法包括:
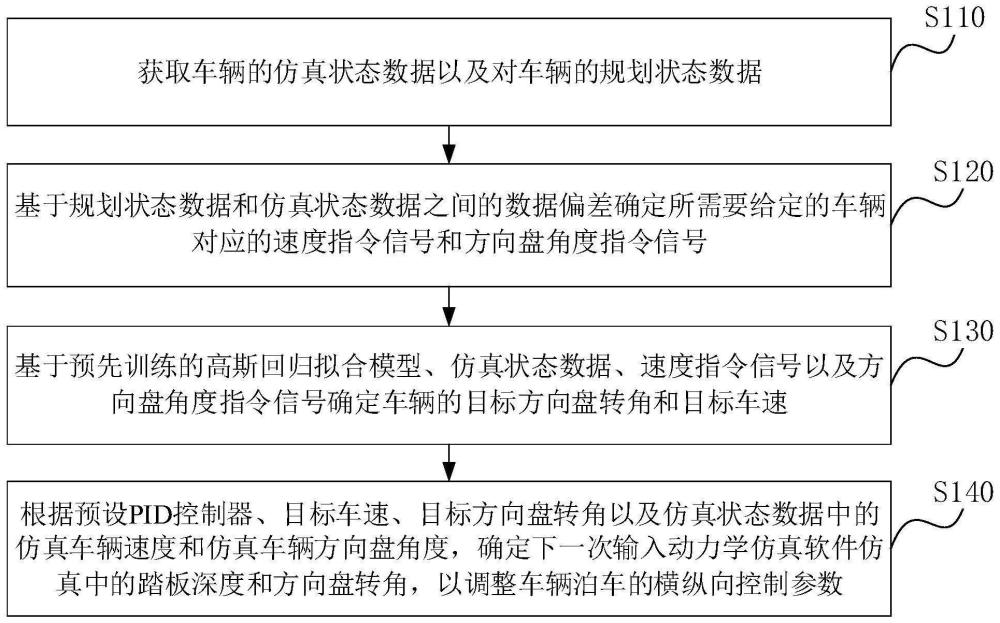
3、获取车辆的仿真状态数据以及对所述车辆的规划状态数据;
4、基于所述规划状态数据和所述仿真状态数据之间的数据偏差确定所需要给定的所述车辆对应的速度指令信号和方向盘角度指令信号;
5、基于预先训练的高斯回归拟合模型、所述仿真状态数据、所述速度指令信号以及所述方向盘角度指令信号确定所述车辆的目标方向盘转角和目标车速;
6、根据预设pid控制器、所述目标车速、所述目标方向盘转角以及所述仿真状态数据中的仿真车辆速度和仿真车辆方向盘角度,确定下一次输入动力学仿真软件中的踏板深度和方向盘转角,以调整车辆泊车的横纵向控制参数。
7、根据本发明的另一方面,本发明实施例还提供了一种车辆泊车过程中横纵向控制参数更新调整装置,所述装置包括:
8、数据获取模块,用于获取车辆的仿真状态数据以及对所述车辆的规划状态数据;
9、信号确定模块,用于基于所述规划状态数据和所述仿真状态数据之间的数据偏差确定所需要给定的所述车辆对应的速度指令信号和方向盘角度指令信号;
10、目标信息确定模块,用于基于预先训练的高斯回归拟合模型、所述仿真状态数据、所述速度指令信号以及所述方向盘角度指令信号确定所述车辆的目标方向盘转角和目标车速;
11、调整模块,用于根据预设pid控制器、所述目标车速、所述目标方向盘转角以及所述仿真状态数据中的仿真车辆速度和仿真车辆方向盘角度,确定下一次输入动力学仿真软件仿真中的踏板深度和方向盘转角,以调整车辆泊车的横纵向控制参数。
12、根据本发明的另一方面,本发明实施例还提供了一种电子设备,所述电子设备包括:
13、至少一个处理器;以及
14、与所述至少一个处理器通信连接的存储器;其中,
15、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的车辆泊车过程中横纵向控制参数更新调整方法。
16、根据本发明的另一方面,本发明实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的车辆泊车过程中横纵向控制参数更新调整方法。
17、本发明实施例的技术方案,通过车辆的仿真状态数据以及对车辆的规划状态数据之间的数据偏差,确定所需给定的车辆的速度指令信号和方向盘角度指令信号;继而基于高斯回归拟合模型、仿真状态数据、速度指令信号以及方向盘角度指令信号确定车辆的目标方向盘转角和目标车速;根据预设pid控制器、目标车速、目标方向盘转角、仿真车辆速度和仿真车辆方向盘角度确定下一次输入动力学仿真软件仿真中的踏板深度和方向盘转角,以调整车辆泊车的横纵向控制参数,能够实现实际车辆的动力学真实响应模拟,既减少实际车辆资源的依赖,又避免浪费人力资源与时间成本,且使得泊车控制更加准确。
18、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种车辆泊车过程中横纵向控制参数更新调整方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述获取车辆的仿真状态数据以及对所述车辆的规划状态数据,包括:
3.根据权利要求1所述的方法,其特征在于,所述基于所述规划状态数据和所述仿真状态数据之间的数据偏差确定所需要给定的所述车辆对应的速度指令信号和方向盘角度指令信号,包括:
4.根据权利要求1所述的方法,其特征在于,所述预先训练的高斯回归拟合模型包括:预先训练的第一高斯回归拟合模型和预先训练的第二高斯回归拟合模型;
5.根据权利要求4所述的方法,其特征在于,所述延时所述下一速度延时时间t1,并根据所述仿真状态数据中的仿真车辆速度和所述速度指令信号的第一比较确定所述车辆的目标车速,包括:
6.根据权利要求4所述的方法,其特征在于,所述延时下一方向盘转角延时时间t2,并根据所述车辆的仿真状态数据中的仿真车辆方向盘角度和所述方向盘角度指令信号的第二比较确定所述车辆的目标方向盘转角,包括:
7.根据权利要求1所述的方法,其特征在于,所述根据预设pid控制器、所述目标车速、所述目标方向盘转角以及所述仿真状态数据中的仿真车辆速度和仿真车辆方向盘角度,确定下一次输入所述动力学仿真软件中的踏板深度和方向盘转角,包括:
8.根据权利要求4所述的方法,其特征在于,所述第一高斯回归拟合模型的训练包括:
9.根据权利要求4所述的方法,其特征在于,所述第二高斯回归拟合模型的训练包括:
10.一种车辆泊车过程中横纵向控制参数更新调整装置,其特征在于,所述装置,包括:
11.一种电子设备,其特征在于,所述电子设备包括:
12.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-9中任一项所述的车辆泊车过程中横纵向控制参数更新调整方法。
技术总结
本发明公开一种车辆泊车过程中横纵向控制参数更新调整方法、装置、设备和介质。该方法包括:基于所获取的规划状态数据和仿真状态数据之间的数据偏差确定所需给定的车辆的速度指令信号和方向盘角度指令信号;基于高斯回归拟合模型、仿真状态数据、速度指令信号以及方向盘角度指令信号确定车辆的目标方向盘转角和目标车速;根据预设PID控制器、目标车速、目标方向盘转角、仿真车辆速度和仿真车辆方向盘角度确定下一次输入动力学仿真软件中的踏板深度和方向盘转角,以调整车辆泊车的横纵向控制参数。本发明实施例,通过上述技术方案,能够实现实际车辆的动力学真实响应模拟,减少实际车辆资源的依赖,避免浪费资源与时间成本,且使泊车控制更加准确。
技术研发人员:余忠伟,张绪胜,利航
受保护的技术使用者:惠州市德赛西威智能交通技术研究院有限公司
技术研发日:
技术公布日:2024/5/27
- 还没有人留言评论。精彩留言会获得点赞!