机器人感知系统及感知定位方法与流程
本发明涉及智能机器人,尤其涉及机器人感知系统及感知定位方法。
背景技术:
1、在井下巷道掘进工作面迎头位置紧靠掘进机,由于掘进机位于巷道中间位置,距巷帮距离为2m左右,属于狭窄作业区域,通过无轨胶轮车运送的锚杆、铁丝网无法送达,只能在距离迎头100-200m左右位置卸车,进而通过人工搬运方式送至掘进机迎头位置,大大增加了工人的劳动强度,此外,掘进工作面迎头位置顶板打锚杆锚索需高空作业,通过人工将锚杆、锚索举升进一步加大了工人劳动强度和作业危险性。因此,探索通过机器人技术辅助人工搬运或者代替人工搬运,将有效改善井下工人作业模式,降低工人劳动强度,提高物料转载效率,进而提升井下作业安全性。
2、基于上述背景,款用窄型转载机器人应运而生,它能够代替人工搬运,但一般的转载机器人没有设置传感器系统,在狭窄作业区域很容易碰到障碍物,甚至发生事故。
技术实现思路
1、本发明提供机器人感知系统及感知定位方法,通过在矿用窄型履带转载机器人上设置感知系统,使矿用窄型履带转载机器人在工作时,不仅能够规避障碍物,避免发生事故,而且本发明还增设了无线遥控器,它能够获取各传感器的工作状态和工作参数,进而对矿用窄型履带转载机器人进行控制定位,无需人工当场控制,不仅节省了人力,而且使矿用窄型履带转载机器人更好地工作,提高了工作效率。
2、为达到上述目的,本发明采用如下技术方案:
3、本发明第一方面提供机器人感知系统,包括:矿用窄型履带转载机器人,还包括:设置于所述矿用窄型履带转载机器人车头处的超声波测距传感器,设置于所述矿用窄型履带转载机器人车斗处的激光传感器,用于遥控所述矿用窄型履带转载机器人的无线遥控器。
4、进一步的,所述的机器人感知系统,还包括:设置于所述矿用窄型履带转载机器人液压支腿处的第一磁致伸缩传感器,设置于所述矿用窄型履带转载机器人升降车斗处的倾角传感器。
5、进一步的,所述的机器人感知系统,还包括:设置于所述矿用窄型履带转载机器人机械立臂处的角度传感器,设置于所述矿用窄型履带转载机器人角度调整液压缸处的第二磁致伸缩传感器,设置于所述矿用窄型履带转载机器人车身位置处的九轴姿态传感器,设置于所述矿用窄型履带转载机器人机械小臂处的编码器,设置于所述矿用窄型履带转载机器人折臂油缸处的第三磁致伸缩传感器,设置于的所述矿用窄型履带转载机器人机械夹爪处三分力传感器。
6、进一步的,所述的机器人感知系统,包括:两个所述超声波测距传感器,分别位于所述矿用窄型履带转载机器人车头的两侧。
7、进一步的,所述的机器人感知系统,包括:四个所述激光传感器,分别位于所述矿用窄型履带转载机器人车斗的四角。
8、进一步的,所述的机器人感知系统,包括:两个所述倾角传感器,分别位于所述矿用窄型履带转载机器人升降车斗的两侧。
9、本发明第二方面提供机器人感知定位方法,包括:
10、通过超声波测距传感器实时监测矿用窄型履带转载机器人在行进过程中距前方障碍物的距离。
11、通过激光传感器实时监测所述矿用窄型履带转载机器人在行进过程中距两侧障碍物或墙壁的距离。
12、根据所述矿用窄型履带转载机器人距前方障碍物的距离以及距两侧障碍物或墙壁的距离,使用无线遥控器对所述矿用窄型履带转载机器人进行遥控定位。
13、进一步的,所述的机器人感知定位方法,还包括:
14、在所述矿用窄型履带转载机器人工作时,通过磁致伸缩传感器获取液压支腿处的位移和通过倾角传感器获取升降车斗的倾角变化,以获取所述矿用窄型履带转载机器人载重是否均匀情况。
15、进一步的,所述的机器人感知定位方法,还包括:
16、在所述矿用窄型履带转载机器人工作时,通过角度传感器获取所述矿用窄型履带转载机器人机械立臂处的角度,通过倾角传感器获取所述矿用窄型履带转载机器人车斗载重后倾斜的角度,通过编码器获取所述矿用窄型履带转载机器人机械小臂处角度位移和直线位移,通过磁致伸缩传感器获取所述矿用窄型履带转载机器人折臂油缸处的位移,通过三分力传感器获取所述矿用窄型履带转载机器人机械夹爪处的受力情况,以便使用所述无线遥控器对所述矿用窄型履带转载机器人进行遥控定位。
17、本发明提供机器人感知系统及感知定位方法,包括:设置于矿用窄型履带转载机器人车头处的超声波测距传感器,设置于矿用窄型履带转载机器人车斗处的激光传感器,用于遥控矿用窄型履带转载机器人的无线遥控器,相比于现有技术,本发明通过在矿用窄型履带转载机器人上设置感知系统,使矿用窄型履带转载机器人在工作时,不仅能够规避障碍物,避免发生事故,而且本发明还增设了无线遥控器,它能够获取各传感器的工作状态和工作参数,进而对矿用窄型履带转载机器人进行控制定位,无需人工当场控制,不仅节省了人力,而且使矿用窄型履带转载机器人更好地工作,提高了工作效率。
技术特征:
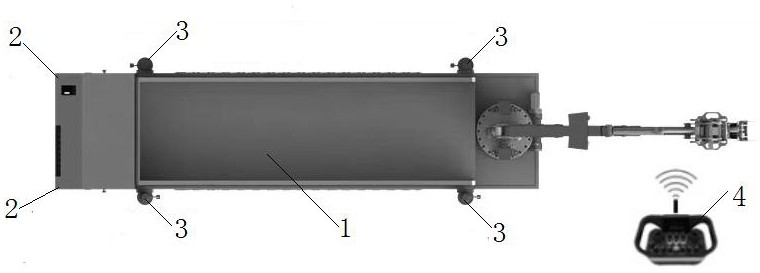
1.机器人感知系统,包括:矿用窄型履带转载机器人(1),其特征在于,还包括:设置于所述矿用窄型履带转载机器人车头处的超声波测距传感器(2),设置于所述矿用窄型履带转载机器人车斗处的激光传感器(3),用于遥控所述矿用窄型履带转载机器人的无线遥控器(4)。
2.根据权利要求1所述的机器人感知系统,其特征在于,还包括:设置于所述矿用窄型履带转载机器人液压支腿处的第一磁致伸缩传感器(5),设置于所述矿用窄型履带转载机器人升降车斗处的倾角传感器(6)。
3.根据权利要求1所述的机器人感知系统,其特征在于,还包括:设置于所述矿用窄型履带转载机器人机械立臂处的角度传感器(7),设置于所述矿用窄型履带转载机器人角度调整液压缸处的第二磁致伸缩传感器(8),设置于所述矿用窄型履带转载机器人车身位置处的九轴姿态传感器(9),设置于所述矿用窄型履带转载机器人机械小臂处的编码器(10),设置于所述矿用窄型履带转载机器人折臂油缸处的第三磁致伸缩传感器(11),设置于的所述矿用窄型履带转载机器人机械夹爪处三分力传感器(12)。
4.根据权利要求1所述的机器人感知系统,其特征在于,包括:两个所述超声波测距传感器(2),分别位于所述矿用窄型履带转载机器人(1)车头的两侧。
5.根据权利要求1所述的机器人感知系统,其特征在于,包括:四个所述激光传感器(3),分别位于所述矿用窄型履带转载机器人(1)车斗的四角。
6.根据权利要求2所述的机器人感知系统,其特征在于,包括:两个所述倾角传感器(6),分别位于所述矿用窄型履带转载机器人(1)升降车斗的两侧。
7.机器人感知定位方法,其特征在于,包括:
8.根据权利要求7所述的机器人感知定位方法,其特征在于,还包括:
9.根据权利要求7所述的机器人感知定位方法,其特征在于,还包括:
技术总结
本发明公开了机器人感知系统及感知定位方法,涉及智能机器人技术领域,本发明通过在矿用窄型履带转载机器人上设置感知系统,使矿用窄型履带转载机器人在工作时,不仅能够规避障碍物,避免发生事故,而且本发明还增设了无线遥控器,它能够获取各传感器的工作状态和工作参数,进而对矿用窄型履带转载机器人进行控制定位,无需人工当场控制,不仅节省了人力,而且使矿用窄型履带转载机器人更好地工作,提高了工作效率。方案为:设置于矿用窄型履带转载机器人车头处的超声波测距传感器,设置于矿用窄型履带转载机器人车斗处的激光传感器,用于遥控矿用窄型履带转载机器人的无线遥控器。本发明用于井下作业中。
技术研发人员:肖耀猛,马俊鹏,张代祥,安成,郑灿广,马庆福,高中祥,蒋洋,杜明超,余铜柱,王龙蛟,朱述川,王兴雨,陈林,杨洋
受保护的技术使用者:兖矿能源集团股份有限公司
技术研发日:
技术公布日:2024/5/27
- 还没有人留言评论。精彩留言会获得点赞!