空中作业机器人的仿真评估系统、方法及电子设备
本申请涉及无人机和机械臂,特别涉及一种空中作业机器人的仿真评估系统、方法及电子设备。
背景技术:
1、无人机具有快速移动能力,机械臂具有高精度操纵能力,二者结合形成的空中作业机器人可以大大拓展现有的无人机和机械臂的应用范围。空中作业机器人可以移动到普通人难以到达的地方,并且完成相关的作业任务。
2、仿真技术是机器人研究领域中的一个重要部分。随着机器人研究的不断深入和机器人领域的不断发展,机器人仿真系统作为机器人设计和研究过程中安全可靠、灵活方便的工具,发挥着越来越重要的作用。但现有技术中针对空中作业机器人的仿真系统较少,且一般只是使机器人在仿真系统中执行简单的任务,无法准确的对空中作业机器人的性能进行评估。
技术实现思路
1、本申请实施例的提供了一种空中作业机器人的仿真评估系统、方法及电子设备,用以更加准确的对空中作业机器人的性能进行评估。
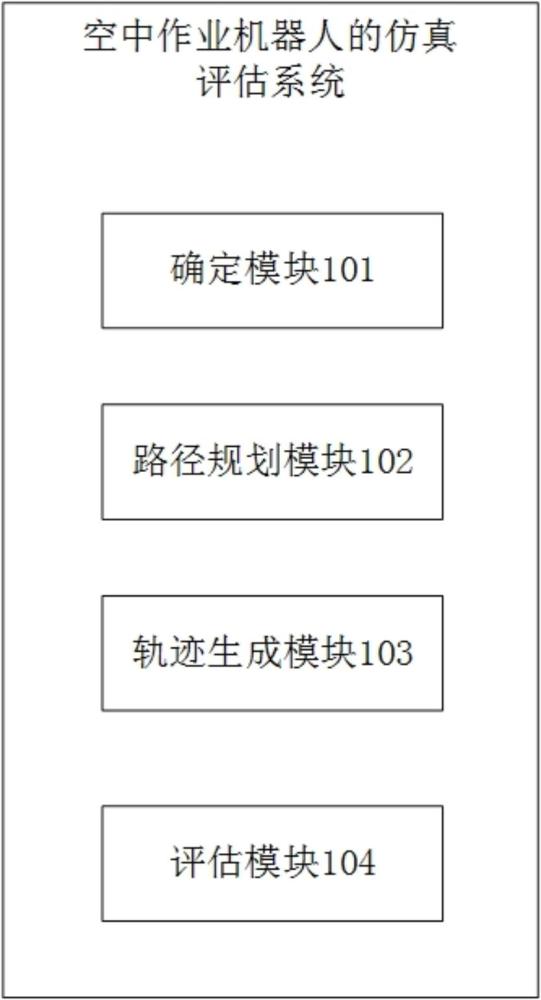
2、第一方面,提供一种空中作业机器人的仿真评估系统,所述仿真评估系统包括:确定模块,用于基于作业配置文件,在预设仿真系统中选定包括飞行平台和作业机构的目标机器人,并确定路径起点、路径终点、作业区域和作业任务;路径规划模块,用于基于可变构型rrt*算法规划出所述飞行平台的移动路径和所述作业机构在所述作业区域内的作业路径,其中,所述可变构型rrt*算法包括先基于rrt*算法在笛卡尔空间中规划所述移动路径,再在构型空间中规划所述作业路径,所述移动路径上包括所述路径起点、所述路径终点和所述作业区域;轨迹生成模块,用于基于所述移动路径和所述作业路径生成目标轨迹;评估模块,用于控制所述目标机器人在所述预设仿真系统中按所述目标轨迹执行所述作业任务,并采用基于任务的量化评估体系对所述目标机器人执行作业任务的过程数据进行评估,生成评估结果。
3、第二方面,提供一种空中作业机器人的仿真评估方法,所述仿真评估方法包括:基于作业配置文件,在预设仿真系统中选定包括飞行平台和作业机构的目标机器人,并确定路径起点、路径终点、作业区域和作业任务;基于可变构型rrt*算法规划出所述飞行平台的移动路径和所述作业机构在所述作业区域内的作业路径,其中,所述可变构型rrt*算法包括先基于rrt*算法在笛卡尔空间中规划所述移动路径,再在构型空间中规划所述作业路径,所述移动路径上包括所述路径起点、所述路径终点和所述作业区域;基于所述移动路径和所述作业路径生成目标轨迹;控制所述目标机器人在所述预设仿真系统中按所述目标轨迹执行所述作业任务,并采用基于任务的量化评估体系对所述目标机器人执行作业任务的过程数据进行评估,生成评估结果。
4、第三方面,提供一种电子设备,包括处理器和存储器,所述存储器中存储有可执行程序,所述处理器执行所述可执行程序以进行如第二方面所述的空中作业机器人的仿真评估方法。
5、第四方面,提供一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现如第二方面所述的空中作业机器人的仿真评估方法。
6、本申请实施例中的空中作业机器人的仿真评估系统,基于可变构型rrt*算法在笛卡尔空间中规划飞行平台的移动路径,在构型空间中规划作业机构在作业区域内的作业路径,并基于移动路径和作业路径生成目标轨迹,使目标轨迹更加符合空中作业机器人的任务执行方式,提高了路径规划的精度,并控制目标机器人在预设仿真系统中按目标轨迹执行作业任务,并采用基于任务的量化评估体系对目标机器人执行作业任务的过程数据进行评估,生成评估结果,实现了对作业机器人的性能的准确评估,进而可基于评估结果优化对真实空中作业机器人的控制方式,提高真实空中作业机器人的安全性和可靠性。
技术特征:
1.一种空中作业机器人的仿真评估系统,其特征在于,所述仿真评估系统包括:
2.如权利要求1所述的空中作业机器人的仿真评估系统,其特征在于,所述路径规划模块,具体用于:
3.如权利要求2所述的空中作业机器人的仿真评估系统,其特征在于,所述路径规划模块,还具体用于:
4.如权利要求1所述的空中作业机器人的仿真评估系统,其特征在于,所述轨迹生成模块,具体用于:
5.如权利要求1所述的空中作业机器人的仿真评估系统,其特征在于,所述基于任务的量化评估体系中的评估指标包括飞行过程评估指标和抓取过程评估指标,所述评估模块,具体用于:
6.如权利要求5所述的空中作业机器人的仿真评估系统,其特征在于,所述飞行过程评估指标为包括有总体飞行时间、关键飞行阶段时间、路径规划准确性、避障性能、终端位置控制精度中的至少两种,所述抓取过程评估指标为包括抓取稳定性、抓取位置控制精度和抓取姿态控制精度中的至少两种。
7.如权利要求5所述的空中作业机器人的仿真评估系统,其特征在于,所述基于任务的量化评估体系中的评估指标还包括仿真环境可扩展性评估指标,所述评估模块,还具体用于:
8.一种空中作业机器人的仿真评估方法,其特征在于,所述仿真评估方法包括:
9.一种电子设备,其特征在于,包括处理器和存储器,所述存储器中存储有可执行程序,所述处理器执行所述可执行程序以进行如权利要求8所述的空中作业机器人的仿真评估方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求8所述的空中作业机器人的仿真评估方法。
技术总结
本申请公开了一种空中作业机器人的仿真评估系统、方法及电子设备,基于可变构型RRT*算法在笛卡尔空间中规划飞行平台的移动路径,在构型空间中规划作业机构在作业区域内的作业路径,并基于移动路径和作业路径生成目标轨迹,使目标轨迹更加符合空中作业机器人的任务执行方式,提高了路径规划的精度,并控制目标机器人在预设仿真系统中按目标轨迹执行作业任务,并采用基于任务的量化评估体系对目标机器人执行作业任务的过程数据进行评估,生成评估结果,实现了对作业机器人的性能的准确评估,进而可基于评估结果优化对真实空中作业机器人的控制方式,提高真实空中作业机器人的安全性和可靠性。
技术研发人员:沈佳豪,曹华姿,赵世钰
受保护的技术使用者:西湖大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!