智能驾驶调试方法、装置、系统、电子设备及存储介质与流程
本发明涉及智能驾驶,尤其涉及一种智能驾驶调试方法、装置、系统、电子设备及存储介质。
背景技术:
1、车辆智能驾驶控制算法涉及到多个专业知识的融合,本身难度高、实现复杂,且算法程序大多以后台进程的方式运行在车载域控端,以数据和信号的方式进行交互和传递,最终呈现的结果是给规控专业发送感知结果,由规控专业最终对车辆进行控制。现有技术对车辆智能驾驶控制算法的调试通常为人工观察整个驾驶场景,再对算法进行分析,对于复杂车辆智能驾驶控制算法,通常会存在调试效率低且调试结果不准确的问题。
技术实现思路
1、本发明提供了一种智能驾驶调试方法、装置、系统、电子设备及存储介质,以提高调试效率,并提升调试结果的准确性。
2、根据本发明的一方面,提供了一种智能驾驶调试方法,应用于调试系统的电脑端,该方法包括:
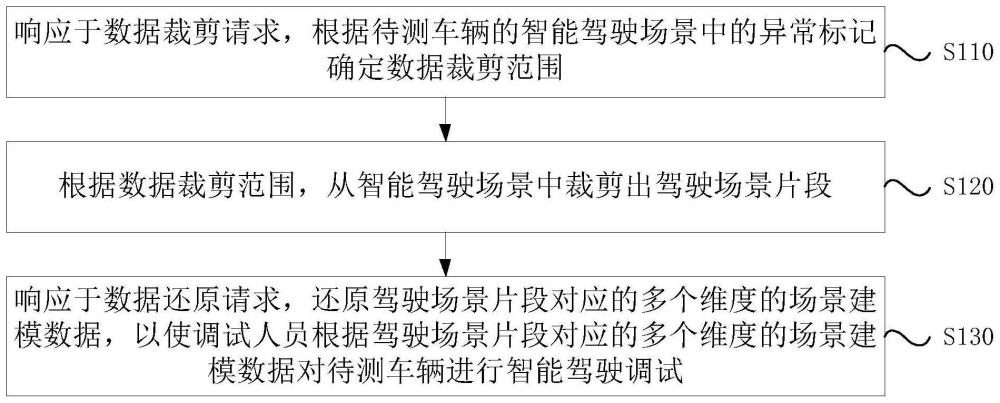
3、响应于数据裁剪请求,根据待测车辆的智能驾驶场景中的异常标记确定数据裁剪范围;
4、根据所述数据裁剪范围,从所述智能驾驶场景中裁剪出驾驶场景片段;
5、响应于数据还原请求,还原所述驾驶场景片段对应的多个维度的场景建模数据,以使调试人员根据所述驾驶场景片段对应的多个维度的场景建模数据对所述待测车辆进行智能驾驶调试。
6、根据本发明的另一方面,提供了一种智能驾驶调试装置,集成于调试系统的电脑端,该装置包括:
7、数据裁剪范围确定模块,用于响应于数据裁剪请求,根据待测车辆的智能驾驶场景中的异常标记确定数据裁剪范围;
8、目标范围数据裁剪模块,用于根据所述数据裁剪范围,从所述智能驾驶场景中裁剪出驾驶场景片段;
9、数据还原模块,用于响应于数据还原请求,还原所述驾驶场景片段对应的多个维度的场景建模数据,以使调试人员根据所述驾驶场景片段对应的多个维度的场景建模数据对所述待测车辆进行智能驾驶调试。
10、根据本发明的另一方面,提供了一种调试系统,该系统包括:待测车辆的车载域控端和电脑端;所述车载域控端包括数据采集模块;
11、所述数据采集模块,用于采集待测车辆在智能驾驶测试过程中多个维度的场景建模数据,并将所述多个维度的场景建模数据发送至所述电脑端;
12、所述电脑端,用于根据所述车载域控端发送的所述多个维度的场景建模数据执行本发明任意实施例所述的智能驾驶调试方法。
13、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
14、至少一个处理器;以及
15、与所述至少一个处理器通信连接的存储器;其中,
16、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的智能驾驶调试方法。
17、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的智能驾驶调试方法。
18、本发明实施例的技术方案,应用于调试系统的电脑端,通过响应于数据裁剪请求,根据待测车辆的智能驾驶场景中的异常标记确定数据裁剪范围;根据数据裁剪范围,从智能驾驶场景中裁剪出驾驶场景片段;响应于数据还原请求,还原驾驶场景片段对应的多个维度的场景建模数据,以使调试人员根据驾驶场景片段对应的多个维度的场景建模数据对待测车辆进行智能驾驶调试。采用异常标记和数据裁剪分析的技术手段,解决了现有技术人工观察整个驾驶场景,再对算法进行分析,对于复杂车辆智能驾驶控制算法,通常会存在调试效率低且调试结果不准确的问题,提高调试效率,并提升调试结果的准确性。
19、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种智能驾驶调试方法,应用于调试系统的电脑端,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述智能驾驶场景采用如下方法构建:
3.根据权利要求2所述的方法,其特征在于,将所述待测车辆的多个维度的场景建模数据进行时间对齐和渲染处理,以构建所述待测车辆的智能驾驶场景,包括:
4.根据权利要求1所述的方法,其特征在于,根据待测车辆的智能驾驶场景中的异常标记确定数据裁剪范围,包括:
5.根据权利要求1所述的方法,其特征在于,所述异常标记通过以下方式标记:
6.根据权利要求1所述的方法,其特征在于,所述异常标记通过以下方式标记:
7.根据权利要求1所述的方法,其特征在于,所述异常标记通过以下方式标记:
8.一种智能驾驶调试装置,集成于调试系统的电脑端,其特征在于,包括:
9.一种调试系统,其特征在于,包括:待测车辆的车载域控端和电脑端;所述车载域控端包括数据采集模块;
10.一种电子设备,其特征在于,所述电子设备包括:
11.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的智能驾驶调试方法。
技术总结
本发明公开了一种智能驾驶调试方法、装置、系统、电子设备及存储介质。该方法应用于调试系统的电脑端,包括响应于数据裁剪请求,根据待测车辆的智能驾驶场景中的异常标记确定数据裁剪范围;根据数据裁剪范围,从智能驾驶场景中裁剪出驾驶场景片段;响应于数据还原请求,还原驾驶场景片段对应的多个维度的场景建模数据,以使调试人员根据驾驶场景片段对应的多个维度的场景建模数据对待测车辆进行智能驾驶调试。本实施例的技术方案提高调试效率,并提升调试结果的准确性。
技术研发人员:曹寅翔,汤永俊,王希进,吴磊,高宝山,冯时
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:
技术公布日:2024/7/4
- 还没有人留言评论。精彩留言会获得点赞!