一种软体机器鱼及其控制方法
本发明涉及水下机器人领域,特别是涉及一种软体机器鱼及其控制方法。
背景技术:
1、随着人类对海洋的探索日趋深入,越来越多的海洋观测装备被研究出来。水下环境复杂性和不确定性给海洋观测装备的使用带来巨大的挑战,比如大型的海洋探测装置操作受限,水下运动能量消耗巨大,且燃料难以补给。因此急切需要一种水下运动灵活且可长时间巡航的水下探测装备,软体仿生机器人应运而生。软体仿生机器人常用硅胶、pdms等柔性材料制成,具有良好的疏水性,可以包裹内部的电子器件并与水环境隔离。其次,软体机器人的运动自由度相较于传统的刚性机器人有了较大的提升,在水下复杂环境中可以提供更多的运动选择性。
2、鱼类作为海洋中最为常见、种类众多、游动性能良好的生物,其进化保留下的高效快速的游动能力得到了研究人员的青睐,大量的仿生机器鱼被研发用于模拟和探索鱼类优秀的游动性能。其中,仿生机器鱼结合软体智能材料,可以保证快速的游动性能并具有耐压防水的结构优势,成为了水下探测领域的新型实用装备。如何减少游动耗能,更高效地完成仿生机器鱼的游动控制,是现有技术所面临的挑战和难点。
3、需要说明的是,在上述背景技术部分公开的信息仅用于对本申请的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本发明的主要目的在于克服上述现有技术中的缺陷,提供一种游动效率高、低耗能的软体机器鱼及其控制方法。
2、为实现上述目的,本发明采用以下技术方案:
3、一种软体机器鱼控制方法,包括:
4、通过传感器实时监测机器鱼游动时的速度、加速度和航向角;
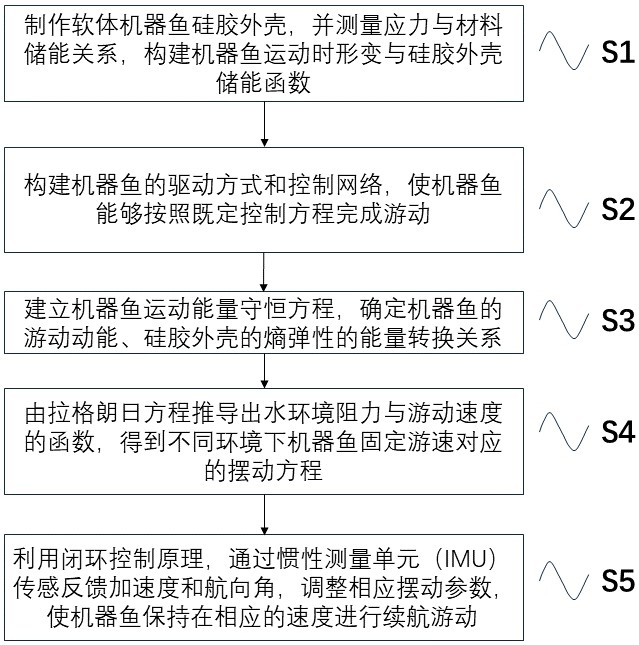
5、根据摆动方程和实时监测的速度、加速度和航向角,确定出最优的摆动参数;其中,所述摆动方程由水环境阻力与游动速度的函数、机器鱼的运动动能、机器鱼外壳在受应力形变时的储存函数即熵弹性,表征机器鱼位姿的广义坐标,以及表征机器鱼所受的驱动力和流体作用力的广义力共同确定;
6、通过中央模式发生器cpg调节控制参数,控制机器鱼按照最优的摆动参数进行摆动,调整机器鱼的游动速度和游动方向。
7、进一步地:
8、所述摆动方程为:
9、
10、其中 ,e k为机器鱼的运动动能、 w为机器鱼外壳在受应力形变时的储存函数即熵弹性,为广义坐标,为广义力, t为时间。
11、取机器鱼的3个串联关节的相对角位移为广义坐标,取机器鱼的关节驱动力矩和流体与鱼体的相互作用力为广义力。
12、机器鱼外壳在受应力形变时的储存函数即熵弹性 w为:
13、
14、其中,g为剪切模量,机器鱼视为由有限的可拉伸的弹性单元连接组成,弹性单元视为长方体,其各边的伸长率表示为,定义为:
15、
16、其中,为各边的初始长度,为各边的长度改变量,当伸长率时,弹性单元被拉伸,当伸长率时,弹性单元被压缩。
17、所述中央模式发生器cpg的控制网络的特征如下:
18、
19、式中,,分别代表对应于机器鱼各个关节的第i个神经元当前的兴奋和抑制状态,,分别代表对应于机器鱼各个关节的第i-1个神经元当前的兴奋和抑制状态,,分别代表对应于机器鱼各个关节的第i+1个神经元当前的兴奋和抑制状态,,分别代表第i个神经元下一时刻的兴奋和抑制状态,代表第i个神经元的振荡频率,表示第i个振荡单元的最大振荡幅值;决定振荡器的收敛速度;是最近耦合的两个振荡器相位差,是最近耦合振荡器相位差的耦合系数。
20、机器鱼的内部采用三级舵机串联,所述cpg控制网络产生的控制信号作为所述三级舵机的输入,通过控制三级舵机的摆动驱动机器鱼游动。
21、所述传感器包括惯性测量单元imu,其感知机器鱼游动时空间状态的3轴瞬时加速度和航向角。
22、机器鱼的外壳采用硬度小于50的硅胶材料。
23、一种计算机可读存储介质,存储有计算机程序,所述计算机程序由处理器执行时,实现所述的软体机器鱼控制方法。
24、一种软体机器鱼,包括机器鱼身体和处理器,所述处理器经配置以执行所述的软体机器鱼控制方法。
25、本发明具有如下有益效果:
26、本发明提供一种软体机器鱼控制方法,通过传感器实时监测机器鱼游动时的速度、加速度和航向角;根据摆动方程和实时监测的速度、加速度和航向角,确定出最优的摆动参数;通过中央模式发生器cpg调节控制参数,控制机器鱼按照最优的摆动参数进行摆动,根据本发明的方法,能够减少机器鱼摆动消耗的能量,提高游动效率,延长机器鱼的游动续航时间。本发明兼具低耗能和多场景定速巡航的优点。
27、本发明实施例还具有如下优点:
28、1.软体仿生机器鱼采用软体硅胶外壳,和3级串行舵机结构,游动灵活,仿生性强,且能有效减少游动耗能。
29、2.软体仿生机器鱼的外壳采用硬度小于50的硅胶浇筑,其外形设计为流线型,硅胶材料可以大幅提高外壳柔顺性,减少游动受到的阻力,提高机器鱼的仿生性。
30、3.机器鱼的外壳紧贴骨架,减少额外空间,尾部向沿身体中心线外侧摆动时,硅胶外壳受到应力产生拉伸形变,一部分动能转化为熵弹性储存在硅胶外壳中,当尾部达到摆动预设方程的最外侧时,释放力矩,利用硅胶外壳中储存的熵弹性摆动回到沿身体中心线的起始位置,可以有效减少游动耗能。
31、4.机器鱼控制方程采用基于hopf的改进cpg控制方法,简化计算步骤,加强相邻关节耦合,可以更高效的完成机器鱼的实时闭环控制。
32、5.通过拉格朗日方程和能量守恒定律分析机器鱼运动状态,计算获得机器鱼在不同环境下的理论游速和舵机扭矩,产生相应控制信号输入舵机做出相应游动动作,收集传感数据调整控制信号参数完成闭环控制,实现在不同环境下的定速游动。
33、本发明实施例中的其他有益效果将在下文中进一步述及。
技术特征:
1.一种软体机器鱼控制方法,其特征在于,包括:
2.如权利要求1所述的软体机器鱼控制方法,其特征在于,所述摆动方程为:
3.如权利要求2所述的软体机器鱼控制方法,其特征在于,取机器鱼的3个串联关节的相对角位移为广义坐标,取机器鱼的关节驱动力矩和流体与鱼体的相互作用力为广义力。
4.如权利要求1至3任一项所述的软体机器鱼控制方法,其特征在于,机器鱼外壳在受应力形变时的储存函数即熵弹性w为:
5.如权利要求1至3任一项所述的软体机器鱼控制方法,其特征在于,所述中央模式发生器cpg的控制网络的特征如下:
6.如权利要求5所述的软体机器鱼控制方法,其特征在于,机器鱼的内部采用三级舵机串联,所述cpg控制网络产生的控制信号作为所述三级舵机的输入,通过控制三级舵机的摆动驱动机器鱼游动。
7.如权利要求1至3任一项所述的软体机器鱼控制方法,其特征在于,所述传感器包括惯性测量单元imu,其感知机器鱼游动时空间状态的3轴瞬时加速度和航向角。
8.如权利要求1至3任一项所述的软体机器鱼控制方法,其特征在于,机器鱼的外壳采用硅胶材料。
9.一种计算机可读存储介质,存储有计算机程序,其特征在于,所述计算机程序由处理器执行时,实现如权利要求1至8任一项所述的软体机器鱼控制方法。
10.一种软体机器鱼,包括机器鱼身体和处理器,其特征在于,所述处理器经配置以执行如权利要求1至8任一项所述的软体机器鱼控制方法。
技术总结
一种软体机器鱼及其控制方法,该方法包括:通过传感器实时监测机器鱼游动时的速度、加速度和航向角;根据摆动方程和实时监测的速度、加速度和航向角,确定出最优的摆动参数;其中,所述摆动方程由水环境阻力与游动速度的函数、机器鱼的运动动能、机器鱼外壳在受应力形变时的储存函数即熵弹性,表征机器鱼位姿的广义坐标,以及表征机器鱼所受的驱动力和流体作用力的广义力共同确定;通过中央模式发生器CPG调节控制参数,控制机器鱼按照最优的摆动参数进行摆动,调整机器鱼的游动速度和游动方向。本发明的方法能够减少机器鱼摆动消耗的能量,提高游动效率,延长机器鱼的游动续航时间,兼具低耗能和多场景定速巡航的优点。
技术研发人员:曲钧天,王云飞
受保护的技术使用者:清华大学深圳国际研究生院
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!