高速动车组无模型自适应滑模控制方法、系统及电子设备
本发明涉及一般的控制与调节,特别是涉及一种高速动车组无模型自适应滑模控制方法、系统及电子设备。
背景技术:
1、随着高速动车组应用逐渐广泛,乘客对高速动车组准点到达、平稳运行的要求也越发严格。但由于高速动车组运行系统是一个受复杂环境影响的非线性时变系统,难以建立精准的数学模型。进而劣化控制效果。而目前,在已有的高速动车组运行控制中,控制算法大多数依赖精准的数学模型,无法在高速动车组上直接应用。
2、数据驱动控制算法由于其不依赖数学模型信息的优点得到广泛关注,然而,这类算法控制精度较低,同时控制器中的参数选择会直接影响控制器的性能。对于多输入多输出的高速动车组系统,参数选择的多样性增加了控制器设计的时间成本。此外,现有还公开了无模型自适应控制方法,例如,文献“李中奇, 周靓, 杨辉. 高速动车组数据驱动无模型自适应控制方法[j]. 自动化学报, 2023, 49(2):437-447.”,采用的是紧格式和偏格式无模型自适应控制算法,并在准则函数中引入节能项。文献“叶美瀚.基于无模型自适应迭代学习的高速列车运行控制方法研究. 华东交通大学, 2023.”,在无模型自适应控制理论的基础上结合迭代学习和pid控制。但是公开的多输入多输出无模型自适应控制方法需要人工调试众多参数,这也增加了人工调试参数的时间成本。因此,有必要进一步研究高速动车组的控制算法,以实现高精度追踪。
技术实现思路
1、本发明的目的是提供一种能够对高速列车进行精准速度跟踪的高速动车组无模型自适应滑模控制方法、系统及电子设备。
2、为实现上述目的,本发明提供了如下方案:
3、一种高速动车组无模型自适应滑模控制方法,包括:
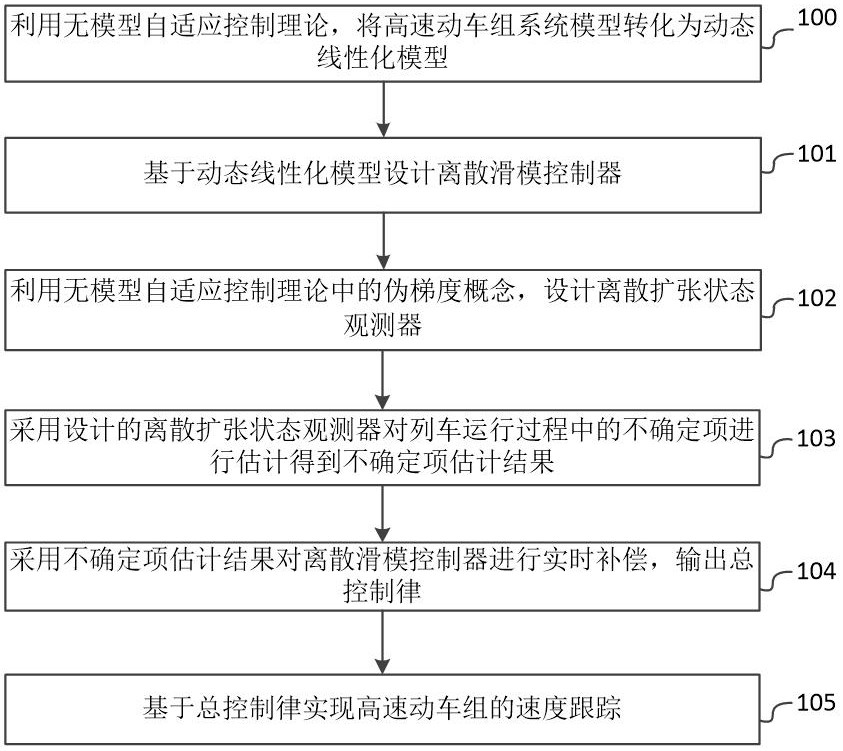
4、利用无模型自适应控制理论,将高速动车组系统模型转化为动态线性化模型;
5、基于所述动态线性化模型设计离散滑模控制器;
6、利用无模型自适应控制理论中的伪梯度概念,设计离散扩张状态观测器;
7、采用设计的离散扩张状态观测器对列车运行过程中的不确定项进行估计得到不确定项估计结果;
8、采用所述不确定项估计结果对所述离散滑模控制器进行实时补偿,输出总控制律;
9、基于所述总控制律实现高速动车组的速度跟踪。
10、根据本发明提供的具体实施例,本发明公开了以下技术效果:
11、本发明首先利用无模型自适应控制理论,将高速列车复杂模型转化为全格式动态线性化模型,其次利用线性化模型设计离散滑模控制器,选取离散积分滑模面消除滑模面到达阶段的抖振,切换控制选取斜率变化较小的双曲正切函数使得切换更加平缓。进一步利用伪梯度的概念设计离散扩张状态观测器(discrete extended state observer,deso)对列车运行过程中的不确定项进行估计,实现对离散滑模控制器的实时补偿,进而在降低时间控制成本的同时,实现速度跟踪的精准控制。
12、进一步,本发明提供了一种用于高速动车组无模型自适应滑模控制方法的系统;所述系统包括:
13、动态线性化处理模块,用于利用无模型自适应控制理论,将高速动车组系统模型转化为动态线性化模型;
14、控制器设计模块,用于基于所述动态线性化模型设计离散滑模控制器;
15、观测器设计模块,用于利用无模型自适应控制理论中的伪梯度概念,设计离散扩张状态观测器;
16、不确定项估计模块,用于采用设计的离散扩张状态观测器对列车运行过程中的不确定项进行估计得到不确定项估计结果;
17、实时补偿模块,用于采用所述不确定项估计结果对所述离散滑模控制器进行实时补偿,输出总控制律;
18、速度跟踪模块,用于基于所述总控制律实现高速动车组的速度跟踪。
19、再进一步,本发明还提供了一种电子设备,该电子设备包括:
20、存储器,用于存储计算机程序;
21、处理器,与所述存储器连接,用于调取并执行所述计算机程序,以实施上述提供的高速动车组无模型自适应滑模控制方法。
22、因本发明提供的系统和电子设备实现的技术效果与本发明上述提供的高速动车组无模型自适应滑模控制方法实现的技术效果相同,故在此不再进行赘述。
技术特征:
1.一种高速动车组无模型自适应滑模控制方法,其特征在于,包括:
2.根据权利要求1所述的高速动车组无模型自适应滑模控制方法,其特征在于,利用无模型自适应控制理论,将高速动车组系统模型转化为动态线性化模型,具体包括:
3.根据权利要求1所述的高速动车组无模型自适应滑模控制方法,其特征在于,设计的所述离散滑模控制器采用离散积分滑模面。
4.根据权利要求1所述的高速动车组无模型自适应滑模控制方法,其特征在于,设计的离散扩张状态观测器表示为:
5.根据权利要求4所述的高速动车组无模型自适应滑模控制方法,其特征在于,k时刻不确定项的估计值满足的饱和函数为:
6.根据权利要求5所述的高速动车组无模型自适应滑模控制方法,其特征在于,所述总控制律表示为:
7.一种高速动车组无模型自适应滑模控制系统,其特征在于,所述系统用于实施如权利要求1-6任意一项所述的高速动车组无模型自适应滑模控制方法;所述系统包括:
8.一种电子设备,其特征在于,包括:
9.根据权利要求8所述的电子设备,其特征在于,所述存储器为计算机可读存储介质。
技术总结
本发明公开的高速动车组无模型自适应滑模控制方法、系统及电子设备,涉及一般的控制与调节技术领域。本发明首先利用无模型自适应控制理论,将高速列车复杂模型转化为全格式动态线性化模型,其次利用线性化模型设计离散滑模控制器,选取离散积分滑模面消除滑模面到达阶段的抖振,切换控制选取斜率变化较小的双曲正切函数使得切换更加平缓。进一步利用无模型自适应控制理论中的伪梯度概念设计离散扩张状态观测器对列车运行过程中的不确定项进行估计,实现对离散滑模控制器的实时补偿,进而进而在降低时间控制成本的同时,实现速度跟踪的精准控制。
技术研发人员:李中奇,姜梦琪,周靓,杨辉,付雅婷,谭畅
受保护的技术使用者:华东交通大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!