本发明涉及建筑施工工程领域,特指一种基于bim的质检机器人的控制系统、方法及存储介质。
背景技术:
1、建筑工程包括房建工程、机场、会展展馆等,其中房建工程中又含有高层建筑工程。传统的质量实测实量方式基本依赖人工解决,存在诸多弊端:人工检测读数存在误差;纸质登记效率低,大量表格留档整理费时费力;测量效率低,现场一般需配备2人共同操作,一人测量一人记录及标注;数据真实性难保障,存在人为修改检测数据的风险。现有技术中也有为检测人员配置智能检测终端的做法,检测人员通过手持智能检测终端对指定部位进行质量检测,然后通过智能检测终端录入对应的检测结果,其解决了纸质登记效率以及人工记录和标注较为费时的问题,但其同样是需要人工到指定位置进行检测,效率较低,且还存在人为录入数据的真实性难以保障的问题。
技术实现思路
1、本发明的目的在于克服现有技术的缺陷,提供一种基于bim的质检机器人的控制系统、方法及存储介质,解决现有的人工检测存在的效率低、数据真实性难以保障等的问题。
2、实现上述目的的技术方案是:
3、本发明提供了一种基于bim的质检机器人控制方法,包括如下步骤:
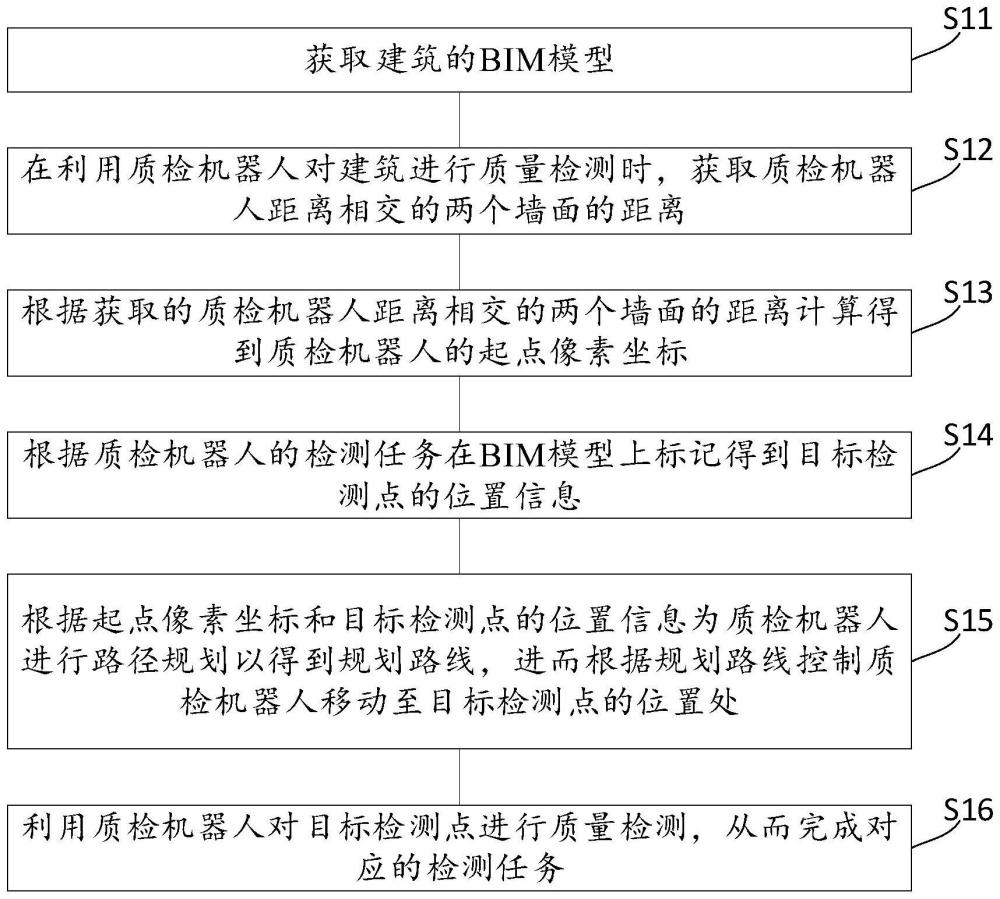
4、获取建筑的bim模型;
5、在利用质检机器人对建筑进行质量检测时,获取质检机器人距离相交的两个墙面的距离;
6、根据获取的质检机器人距离相交的两个墙面的距离计算得到质检机器人的起点像素坐标;
7、根据质检机器人的检测任务在所述bim模型上标记得到目标检测点的位置信息;
8、根据所述起点像素坐标和所述目标检测点的位置信息为所述质检机器人进行路径规划以得到规划路线,进而根据所述规划路线控制所述质检机器人移动至目标检测点的位置处;
9、利用所述质检机器人对目标检测点进行质量检测,从而完成对应的检测任务。
10、本发明的控制方法能够根据检测任务为质检机器人规划路线,且路线的规划结合了建筑的bim模型,能够获得清晰的建筑结构边界,实现了质检机器人自动化完成质量检测,提高了检测效率,且检测数据由机器人检测形成,相较于人工录入检测结果能够保证数据的真实性。
11、本发明基于bim的质检机器人控制方法的进一步改进在于,根据质检机器人的检测任务在所述bim模型上标记得到目标检测点的位置信息包括如下步骤:
12、选择bim模型中对应检测任务的楼层;
13、将选择的楼层中对应所述质检机器人的高度的结构部分向所述选择的楼层的地板进行投影,以得到所述选择的楼层的边界范围图;
14、将所得到的边界范围图进行像素转换以得到栅格地图的底图;
15、在所得到的栅格地图的底图上标记目标检测点作为质检机器人的终点位置。
16、本发明基于bim的质检机器人控制方法的进一步改进在于,在为所述质检机器人进行路径规划时,利用栅格地图rrt算法进行路径规划,以得到规划路线。
17、本发明基于bim的质检机器人控制方法的进一步改进在于,在根据所述规划路线控制所述质检机器人移动至目标检测点的位置处时,还包括:
18、获取所述质检机器人运动方向上的点云数据;
19、对所获取的点云数据进行处理以形成边界数据;
20、将所述边界数据与所述bim模型的边界进行比对;
21、当所述边界数据与所述bim模型的边界中某一位置有70%及以上重合时,则判断得到所述质检机器人位于所述bim模型的边界中70%及以上重合的位置处。
22、本发明基于bim的质检机器人控制方法的进一步改进在于,在利用所述质检机器人对目标检测点进行质量检测时,对所述质检机器人的检测数据进行保存。
23、本发明还提供了一种存储介质,所述存储介质上存储有基于bim的质检机器人控制方法的程序,所述基于bim的质检机器人控制方法的程序被处理器执行时实现所述的基于bim的质检机器人控制方法的步骤。
24、本发明又提供了一种基于bim的质检机器人控制系统,包括:
25、获取单元,用于获取建筑的bim模型;
26、采集单元,与质检机器人连接,用于在所述质检机器人对建筑进行质量检测时,获取所述质检机器人距离相交的两个墙面的距离;
27、起点计算单元,与所述采集单元连接,用于根据获取的质检机器人距离相交的两个墙面的距离计算得到质检机器人的起点像素坐标;
28、终点计算单元,与所述获取单元连接,用于根据所述质检机器人的检测任务在所述bim模型上标记得到目标检测点的位置信息;
29、路径规划单元,与所述起点计算单元和所述终点计算单元连接,用于根据所述起点像素坐标和所述目标检测点的位置信息为所述质检机器人进行路径规划以得到规划路线;
30、处理单元,与所述路径规划单元和所述质检机器人连接,用于根据所述规划路线控制所述质检机器人移动至目标检测点的位置处,还用于控制所述质检机器人对目标检测点进行质量检测,从而完成对应的检测任务。
31、本发明基于bim的质检机器人控制系统的进一步改进在于,所述终点计算单元还用于选择bim模型中对应检测任务的楼层;将选择的楼层中对应所述质检机器人的高度的结构部分向所述选择的楼层的地板进行投影,以得到所述选择的楼层的边界范围图;将所得到的边界范围图进行像素转换以得到栅格地图的底图;在所得到的栅格地图的底图上标记目标检测点作为质检机器人的终点位置。
32、本发明基于bim的质检机器人控制系统的进一步改进在于,所述路径规划单元用于利用栅格地图rrt算法进行路径规划,以得到规划路线。
33、本发明基于bim的质检机器人控制系统的进一步改进在于,所述处理单元还用于获取所述质检机器人运动方向上的点云数据;对所获取的点云数据进行处理以形成边界数据;将所述边界数据与所述bim模型的边界进行比对;当所述边界数据与所述bim模型的边界中某一位置有70%及以上重合时,则判断得到所述质检机器人位于所述bim模型的边界中70%及以上重合的位置处。
技术特征:1.一种基于bim的质检机器人控制方法,其特征在于,包括如下步骤:
2.如权利要求1所述的基于bim的质检机器人控制方法,其特征在于,根据质检机器人的检测任务在所述bim模型上标记得到目标检测点的位置信息包括如下步骤:
3.如权利要求2所述的基于bim的质检机器人控制方法,其特征在于,在为所述质检机器人进行路径规划时,利用栅格地图rrt算法进行路径规划,以得到规划路线。
4.如权利要求1所述的基于bim的质检机器人控制方法,其特征在于,在根据所述规划路线控制所述质检机器人移动至目标检测点的位置处时,还包括:
5.如权利要求1所述的基于bim的质检机器人控制方法,其特征在于,在利用所述质检机器人对目标检测点进行质量检测时,对所述质检机器人的检测数据进行保存。
6.一种存储介质,其特征在于,所述存储介质上存储有基于bim的质检机器人控制方法的程序,所述基于bim的质检机器人控制方法的程序被处理器执行时实现如权利要求1至5中任一项所述的基于bim的质检机器人控制方法的步骤。
7.一种基于bim的质检机器人控制系统,其特征在于,包括:
8.如权利要求7所述的基于bim的质检机器人控制系统,其特征在于,所述终点计算单元还用于选择bim模型中对应检测任务的楼层;将选择的楼层中对应所述质检机器人的高度的结构部分向所述选择的楼层的地板进行投影,以得到所述选择的楼层的边界范围图;将所得到的边界范围图进行像素转换以得到栅格地图的底图;在所得到的栅格地图的底图上标记目标检测点作为质检机器人的终点位置。
9.如权利要求8所述的基于bim的质检机器人控制系统,其特征在于,所述路径规划单元用于利用栅格地图rrt算法进行路径规划,以得到规划路线。
10.如权利要求7所述的基于bim的质检机器人控制系统,其特征在于,所述处理单元还用于获取所述质检机器人运动方向上的点云数据;对所获取的点云数据进行处理以形成边界数据;将所述边界数据与所述bim模型的边界进行比对;当所述边界数据与所述bim模型的边界中某一位置有70%及以上重合时,则判断得到所述质检机器人位于所述bim模型的边界中70%及以上重合的位置处。
技术总结本发明涉及一种基于BIM的质检机器人控制系统、方法及存储介质,该方法包括如下步骤:获取建筑的BIM模型;在利用质检机器人对建筑进行质量检测时,获取质检机器人距离相交的两个墙面的距离;根据获取的质检机器人距离相交的两个墙面的距离计算得到质检机器人的起点像素坐标;根据质检机器人的检测任务在BIM模型上标记得到目标检测点的位置信息;根据起点像素坐标和目标检测点的位置信息为质检机器人进行路径规划以得到规划路线,进而根据规划路线控制质检机器人移动至目标检测点的位置处;利用质检机器人对目标检测点进行质量检测,从而完成对应的检测任务。本发明能够根据检测任务为质检机器人规划路线,且路线的规划结合了建筑的BIM模型,能够获得清晰的建筑结构边界,实现了质检机器人自动化完成质量检测,提高了检测效率。
技术研发人员:孙文博,张凡,蒋绮琛,彭建,潘立程,叶子豪,张林,李得乐,于鑫,贾宝莹
受保护的技术使用者:中国建筑第八工程局有限公司
技术研发日:技术公布日:2024/7/25