基于改进滑模控制算法的球形机器人轨迹跟踪
本发明属于轨迹跟踪,尤其设计一种基于改进滑模控制算法的球形机器人轨迹跟踪方法。
背景技术:
1、球形机器人轨迹跟踪技术在军事、工业、消防救援以及家政服务等多个领域展现出了广泛的应用前景。在轨迹跟踪过程中,常用的算法包括模糊自适应控制算法、基于模型的轨迹跟踪算法、pid控制算法以及滑模控制算法等。其中,滑模控制算法以其出色的高鲁棒性在非线性系统中备受瞩目,然而,它也存在着高频抖颤的问题,这在球形机器人的轨迹跟踪控制应用中是一大障碍。具体来说,造成滑模控制算法在应用中受限的原因主要有以下几点:
2、一、时间滞后开关的干扰效应。由于开关存在时间上的滞后,这导致在切换面附近,控制作用对于状态的精确变化产生延迟。这种延迟在滑模面上表现为一个逐渐衰减的三角波形的叠加。
3、二、空间滞后开关的作用。开关的空间滞后在状态空间中形成了一种“死区”,在这个区域内,状态量的变化受到阻碍。这种效应使得原本光滑的滑模面上叠加了一个等幅值的波形。
4、三、系统惯性的制约因素。系统惯性使得控制切换动作不能立即响应,产生了时间上的滞后。这种滞后现象在滑模面上表现为一个逐渐衰减的三角波形的叠加,影响了轨迹跟踪的精度和稳定性。
5、四、离散系统引起的抖振现象。由于离散系统的特性,其切换动作并非精确发生在切换面上,而是发生在一个以原点为顶点的锥形体表面上。这种非精确切换导致了衰减的抖振,影响了滑模控制的稳定性和效果。
技术实现思路
1、本发明旨在解决现有的球形机器人基于滑模控制的球形机器人轨迹跟踪方法在滑动模态下易产生高频抖颤的问题。
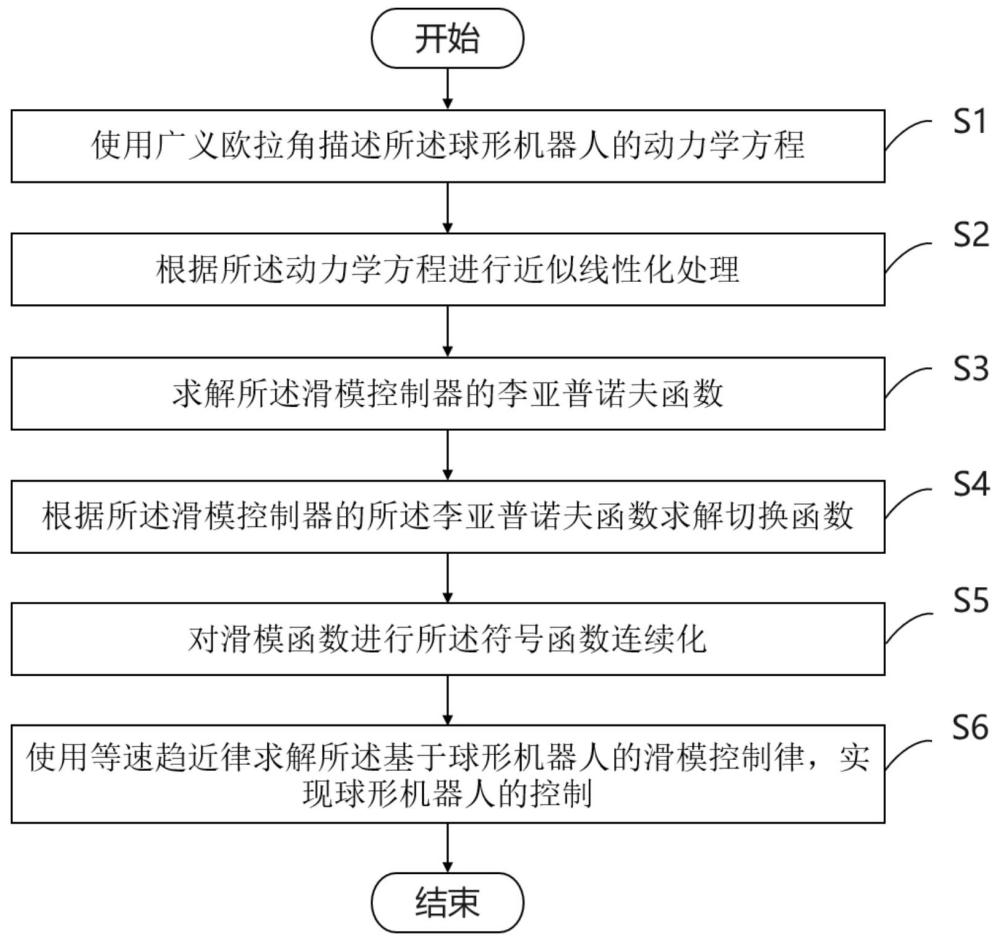
2、为解决上述技术的问题,本发明提供了一种基于改进滑模控制算法的球形机器人轨迹跟踪方法,所述球形机器人轨迹跟踪方法包括一下步骤:
3、s1、使用广义欧拉角描述所述球形机器人的动力学方程;
4、s2、根据所述动力学方程进行近似线性化处理;
5、s3、求解所述滑模控制器的李亚普诺夫函数;
6、s4、根据所述滑模控制器的所述李亚普诺夫函数求解切换函数;
7、s5、对滑模函数进行所述符号函数连续化;
8、s6、使用等速趋近律求解所述基于球形机器人的滑模控制律,实现球形机器人的控制;
9、更进一步地,步骤s1具体为:
10、所述广义欧拉角采用卡尔丹角的描述方法,是一种在三维空间中描述物体方向或方位的常用方法,如图2所示,采用三个独立的角变量来表示球体的方位,球体的三个广义欧拉角分别为横向滚动角、方位角和纵向俯仰角。
11、取球心且平行地面的平面作为零势能面,定义是系统的势能,其满足:
12、
13、取横向滚动角、方位角和纵向俯仰角为系统的广义坐标,系统的拉格朗日方程表示为:
14、
15、其中,是系统在方向的纵向驱动力矩,是球形机器人的摩擦力矩,是球形机器人与地面的库伦摩擦力矩。
16、球形机器人的广义欧拉角描述的动力学方程为:
17、
18、其中,是系统在反向的横向转弯力矩,是粘弹性摩擦系数。
19、如图3所示,以半球差动球形机器人的中心位置p的坐标和航向角描述球形机器人的位姿,其中航向角为前进方向与x轴夹角。
20、定义是球形机器人中心的当前位置,其满足:
21、
22、其中,是球形机器人的线速度,是球形机器人的滚动角速度。
23、定义是球形机器人中心的期待位置,其满足:
24、
25、其中,是参考机器人的线速度,是参考机器人的滚动角速度。
26、定义u为一组控制输入学号,其满足:
27、
28、定义是球形机器人中心的位姿误差的微分方程,其满足:
29、
30、球形机器人的轨迹跟踪问题转化为了跟踪位姿误差的镇定问题。
31、更进一步地,步骤s2具体为:
32、定义是系统的拉格朗日函数,其满足:
33、
34、根据所述拉格朗日函数,系统的、存在角速度的耦合,而、和、互相之间不存在加速度耦合人,只存在速度的耦合。当发生微小变化时,其满足:
35、
36、更进一步地,步骤s3具体为:
37、定义是当前位置的误差变量,其满足:
38、
39、
40、其中,是当前时刻的位置,是下一时刻是位置。
41、定义是虚拟控制量,其满足:
42、
43、定义是李亚普诺夫函数,当时,其满足:
44、
45、更进一步地,步骤s4具体为:
46、在设计球形机器人的轨迹跟踪控制系统时,一个关键步骤是构造适当的切换函数,该函数旨在寻找能够使位姿误差逐渐趋近于零的控制输入。这一过程对于确保球形机器人能够精确且稳定地按照预定轨迹运动至关重要。为实现这一目标,采用了李亚普诺夫控制律作为理论基础,通过直接寻求合适的控制律,使得闭环系统具备渐进稳定的特性。
47、对任意的,且,有,当且仅当时,等号成立。
48、取,李亚普诺夫函数的微分表达式满足:
49、
50、当时,虚拟的控制输入趋近于,使得收敛于零。
51、定义为系统的切换函数,其满足:
52、
53、更进一步地,步骤s5具体为:
54、在滑模控制器的过程中,涉及滑模函数的符号函数,使得系统在实现过程中出现离散化,离散系统的切换动作不是正好发生在切换面上,而是发生在以原点为顶点的锥形体表面上,并由此导致衰减的抖振。
55、对等速趋近律引入微小常量,则滑模函数满足:
56、
57、更进一步地,步骤s6具体为:
58、滑模运动包括趋近运动和滑模运动两个运动阶段,趋近运动是系统状态从任意初始位置开始,经过有限时间内到达切换面的运动,为后续的滑模运动奠定基础。
59、取等速趋近律作为所述滑模控制器的控制率,其满足:
60、
61、定义函数:
62、
63、
64、所述函数的导数为:
65、
66、基于球形机器人运动学模型的滑模控制率为:
67、
68、所述基于球形机器人运动学模型的滑模控制率可以确保系统能够快速、准确地进入滑模运动阶段,从而实现高精度的轨迹跟踪控制。
技术特征:
1.一种基于改进滑模控制算法的球形机器人轨迹跟踪方法,其特征在于,所述的球形机器人轨迹跟踪方法包括以下步骤:
2.如权利要求1所述的基于改进滑模控制算法的球形机器人轨迹跟踪方法,其特征在于,定义是球形机器人中心的当前位置,其满足:
3.如权利要求1所述的基于改进滑模控制算法的球形机器人轨迹跟踪方法,其特征在于,根据所述拉格朗日函数,系统的、存在角速度的耦合,而、和、互相之间不存在加速度耦合,只存在速度的耦合;当发生微小变化时,其满足:
4.如权利要求1所述的基于改进滑模控制算法的球形机器人轨迹跟踪方法,其特征在于,对任意的,且,有,当且仅当时,等号成立;
5.如权利要求1所述的基于改进滑模控制算法的球形机器人轨迹跟踪方法,其特征在于,对等速趋近律引入微小常量,则滑模函数满足:
6.如权利要求1所述的基于改进滑模控制算法的球形机器人轨迹跟踪方法,其特征在于,取等速趋近律作为所述滑模控制器的控制率,其满足:
技术总结
本发明属于轨迹跟踪技术领域,尤其设计一种基于改进滑模控制算法的球形机器人轨迹跟踪方法。本发明提出改进了的滑模控制算法,引入广义欧拉角来描述球体的转动,并使用近似线性化的方法处理动力学方程,降低了系统的复杂性,使系统更易于达到理想的高性能控制要求;同时,本发明将球形机器人的轨迹跟踪问题转化为了跟踪位姿误差的镇定问题,实现两者的同时收敛,提高轨迹跟踪的精度和稳定性;基于等速趋近律建立了滑模控制策略,采用符号连续化的方法,在一定程度上削弱抖振,系统渐进稳定,最终使得球形机器人轨迹跟踪过程的效率得到优化。
技术研发人员:李津,李湘儿,罗锦宏,肖博文
受保护的技术使用者:广东工业大学
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!