卸船机控制系统、方法、存储介质及程序产品与流程
本公开涉及散料码头抓斗卸船机,具体地,涉及一种卸船机控制系统、方法、存储介质及程序产品。
背景技术:
1、抓斗卸船机的料斗机构是其重要组成部分,料斗机构用于装载从船舱内所抓取的物料,并将物料输送至码头皮带。在抓斗卸船机工作过程中,会因大块物料或物料粘度较大的原因,导致物料在料斗格栅板上方过度堆积,造成卸船机的抓斗与料斗上的积料碰撞或料斗格栅板堵塞等问题。
技术实现思路
1、本公开的目的是提供一种卸船机控制系统、方法、存储介质及程序产品,可自动监测料斗格栅板上的积料状态,避免抓斗与积料碰撞或料斗格栅板堵塞。
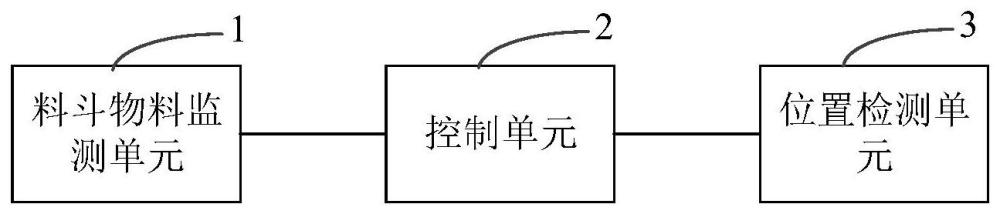
2、为了实现上述目的,第一方面,本公开提供一种卸船机控制系统,所述系统包括料斗物料监测单元、位置检测单元以及控制单元,所述控制单元分别与所述料斗物料监测单元和所述位置检测单元通信连接;
3、所述料斗物料监测单元,用于获取所述卸船机上料斗内的物料高度,并发送给所述控制单元;
4、所述位置检测单元,用于获取所述卸船机上主小车的位置信息,并发送给所述控制单元;
5、所述控制单元,用于根据所述位置信息确定所述主小车是否处于所述卸船机的料斗区,并在所述主小车未处于所述卸船机的料斗区的情况下,根据所述物料高度控制所述卸船机的卸料状态并进行预警。
6、可选地,所述控制单元,用于根据所述位置信息,确定所述主小车与所述卸船机的控制室之间的距离,并根据所述距离,确定所述主小车是否处于所述卸船机的料斗区。
7、可选地,所述控制单元,用于将所述距离与所述料斗的陆侧距离和海侧距离进行比较,所述陆侧距离为所述料斗靠近陆地的侧面与所述控制室之间的距离,所述海侧距离为所述料斗靠近海水的侧面与所述控制室之间的距离;
8、在所述距离大于所述陆侧距离且小于所述海侧距离的情况下,确定所述主小车处于所述卸船机的料斗区;
9、在所述距离小于所述陆侧距离或大于所述海侧距离的情况下,确定所述主小车未处于所述卸船机的料斗区。
10、可选地,所述控制单元包括设置在所述卸船机的控制室内的控制模块和通讯模块,以及设置在所述卸船机上俯仰司机室的子站通讯模块以及模拟量输入模块,所述通讯模块和所述子站通讯模块之间采用profibus-dp协议进行数据通讯,建立所述控制模块与所述模拟量输入模块的数据链接;
11、所述模拟量输入模块,用于接收所述料斗物料监测单元发送的物料高度;
12、所述控制模块,用于将所述物料高度与高度阈值进行比较,并在所述物料高度大于高度阈值的情况下,控制所述卸船机停止卸料并进行预警。
13、可选地,所述高度阈值通过如下方式确定:
14、确定所述料斗物料监测单元的安装高度、料斗格栅板的第一高度、以及所述卸船机的抓斗上停止位的第二高度;
15、将所述安装高度、所述第一高度以及所述第二高度,代入如下计算式,得到高度阈值:
16、h阈值=h料位计-h格栅板-ka(h上停止-h格栅板),
17、其中,h阈值表征高度阈值,h料位计表征料斗物料监测单元的安装高度,h格栅板表征料斗格栅板的第一高度,ka表征余量系数,0.6<ka<0.8,h上停止表征卸船机的抓斗上停止位的第二高度。
18、可选地,所述料斗物料监测单元设置在所述卸船机的前肩梁上靠近陆地的侧面上。
19、可选地,所述料斗物料监测单元包括雷达料位计、激光探测器以及视觉探测设备中的一者。
20、可选地,所述位置检测单元设置在所述卸船机的主小车电机上。
21、第二方面,本公开提供一种卸船机控制方法,所述方法包括:
22、获取所述卸船机上料斗内的物料高度以及所述卸船机上主小车的位置信息;
23、根据所述位置信息确定所述主小车是否处于所述卸船机的料斗区,并在所述主小车未处于所述卸船机的料斗区的情况下,根据所述物料高度控制所述卸船机的卸料状态并进行预警。
24、第三方面,本公开提供一种非临时性计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现第二方面所述的方法。
25、第四方面,本公开提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现第一方面所述的方法。
26、通过上述技术方案,通过料斗物料监测单元获取料斗内的物料高度,可对料斗内的积料高度实时监测;通过位置检测单元获取主小车的位置信息,在根据位置信息确定主小车未处于料斗区时,根据物料高度控制卸船机的卸料状态并进行预警。从而避免因物料在料斗格栅板上方过度堆积导致的卸船机与料斗上的积料碰撞或料斗格栅板堵塞的问题。
27、本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种卸船机控制系统,其特征在于,所述系统包括料斗物料监测单元、位置检测单元以及控制单元,所述控制单元分别与所述料斗物料监测单元和所述位置检测单元通信连接;
2.根据权利要求1所述的卸船机控制系统,其特征在于,所述控制单元,用于根据所述位置信息,确定所述主小车与所述卸船机的控制室之间的距离,并根据所述距离,确定所述主小车是否处于所述卸船机的料斗区。
3.根据权利要求2所述的卸船机控制系统,其特征在于,所述控制单元,用于将所述距离与所述料斗的陆侧距离和海侧距离进行比较,所述陆侧距离为所述料斗靠近陆地的侧面与所述控制室之间的距离,所述海侧距离为所述料斗靠近海水的侧面与所述控制室之间的距离;
4.根据权利要求1-3任一项所述的卸船机控制系统,其特征在于,所述控制单元包括设置在所述卸船机的控制室内的控制模块和通讯模块,以及设置在所述卸船机上俯仰司机室的子站通讯模块以及模拟量输入模块,所述通讯模块和所述子站通讯模块之间采用profibus-dp协议进行数据通讯,建立所述控制模块与所述模拟量输入模块的数据链接;
5.根据权利要求4所述的卸船机控制系统,其特征在于,所述高度阈值通过如下方式确定:
6.根据权利要求1-3任一项所述的卸船机控制系统,其特征在于,所述料斗物料监测单元设置在所述卸船机的前肩梁上靠近陆地的侧面上。
7.根据权利要求6所述的卸船机控制系统,其特征在于,所述料斗物料监测单元包括雷达料位计、激光探测器以及视觉探测设备中的一者。
8.根据权利要求1-3任一项所述的卸船机控制系统,其特征在于,所述位置检测单元设置在所述卸船机的主小车电机上。
9.一种卸船机控制方法,其特征在于,所述方法包括:
10.一种非临时性计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求9所述的卸船机控制方法。
11.一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求9所述的卸船机控制方法。
技术总结
本公开涉及散料码头抓斗卸船机技术领域,尤其涉及一种卸船机控制系统、方法、存储介质及程序产品,可自动监测料斗格栅板上的积料状态。该卸船机控制系统包括料斗格物料监测单元、位置检测单元以及控制单元,控制单元分别与料斗格物料监测单元和位置检测单元通信连接;料斗格物料监测单元,用于获取卸船机上料斗格内的物料高度,并发送给控制单元;位置检测单元,用于获取卸船机上主小车的位置信息,并发送给控制单元;控制单元,用于根据所述位置信息确定主小车是否处于卸船机的料斗区,并在主小车未处于卸船机的料斗区的情况下,根据物料高度控制卸船机的卸料状态并进行预警。
技术研发人员:张翔栋,姜建华,刘俊麟,贺艇,余峰,薛涛
受保护的技术使用者:国能浙江舟山发电有限责任公司
技术研发日:
技术公布日:2024/8/16
- 还没有人留言评论。精彩留言会获得点赞!