一种改进型PID温度控制方法与流程
本发明涉及温度自动控制,具体涉及一种改进型pid温度控制方法。
背景技术:
1、目前,比较经典的用于液体或固体在加热或冷却时的温度自动控制算法为比例-积分-微分pid(proportion-integral-differential coefficient,pid)控制算法。
2、经典的pid控制算法由比例单元p、积分单元i和微分单元d组成。pid控制的基础是比例控制;积分控制可消除稳态误差,但可能增加系统超调量;微分控制可加快大惯性系统响应速度以及减弱超调趋势。pid控制算法的具体公式如下:
3、u(t)=kp*e(t)+ki*[e(1)+e(2)+…+e(t)]+kd*[e(t)-e(t-1)]
4、其中,e(t)为给定值与被控变量的偏差,kp为比例系数,ki为积分时间常数,kd为微分时间常数,t为从开始调节到输出当前控制量所经过的时间间隔。
5、pid控制算法的原理简单,具有结构简单、稳定性好、工作可靠等优点,在自动控制领域应用广泛;但在实现技术过程中,发现上述技术还存在一定技术问题:例如pid控制算法的最佳适用对象是响应快的系统,例如电机。在液体或固体加热(或冷却)的温度自动控制技术领域,热量传导相对于电机运动来说,时效性非常差,即温度自动控制技术领域的热传导时间长,因此被控对象的响应慢。当经典pid控制算法用于温度自动控制技术领域时,升温过程或降温过程的严重滞后性使得热源温度或冷源温度与被控对象实际温度的差值很大,被控对象温度极难稳定。导致被控对象温度进入稳态的时间长,超调幅度大,且进入稳态后精度不高。
技术实现思路
1、针对上述存在的技术不足,本发明要解决的技术问题是提供一种改进型pid温度控制方法,旨在解决现有技术中温度控制过程中,被控对象对于温度的变化响应慢,在被控对象的控制过程中,过冲大,温度不准确,导致温度进入稳态时间长,最终导致控制精度低及控温时间长的问题。
2、为解决上述技术问题,本发明采用如下技术方案:本发明提供一种改进型pid温度控制方法,包括以下步骤:
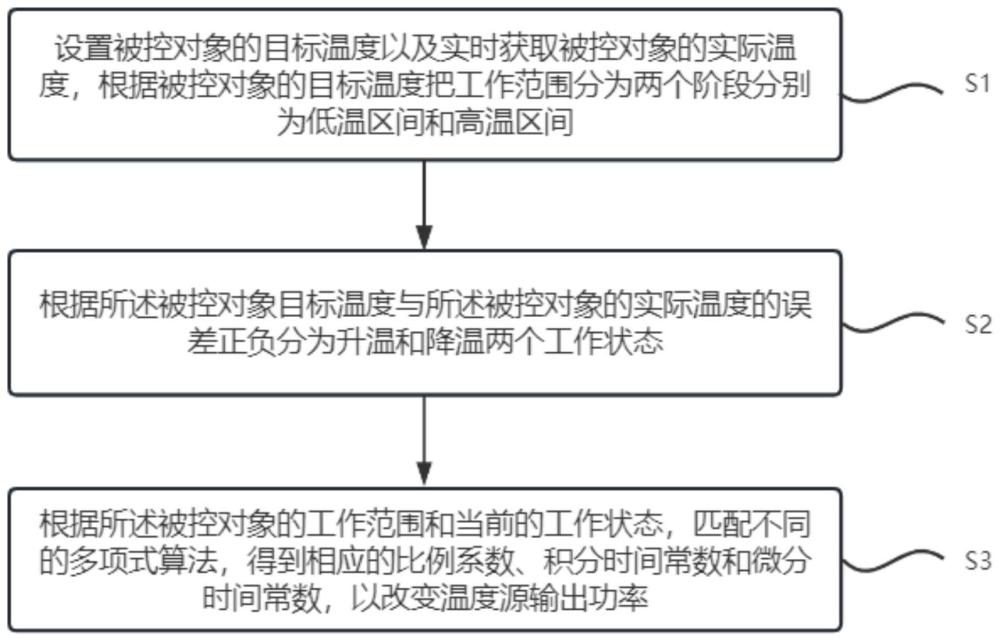
3、s1、设置被控对象的目标温度以及实时获取被控对象的实际温度,根据被控对象的目标温度把工作范围分为两个阶段分别为低温区间和高温区间;
4、s2、根据所述被控对象目标温度与所述被控对象的实际温度的误差正负分为升温和降温两个工作状态;
5、s3、根据所述被控对象的工作范围和当前的工作状态,匹配不同的多项式算法,得到相应的比例系数、积分时间常数和微分时间常数,以改变温度源输出功率。
6、进一步地,4℃到40℃为低温区间,40℃到95℃为高温区间。
7、进一步地,当ta-ts>0时表示降温状态,当ta-ts<0时表示升温状态;其中,ts为被控对象的目标温度,ta为被控对象的实际温度。
8、进一步地,根据所述被控对象的工作范围和当前的工作状态,设置基础温度以及上升/下降的阶梯温度,每次基础温度上升/下降一个阶梯温度并设置为被控对象的目标温度ts;并根据不同被控对象的目标温度ts,设置不同的比例系数kp、积分时间常数ki和微分时间常数kd。
9、进一步地,在低温区间并且为升温状态时,以4℃为基础温度。
10、进一步地,在低温区间并且为降温状态时,以40℃为基础温度。
11、进一步地,在高温区间并且为升温状态时,以40℃为基础温度。
12、进一步地,在高温区间并且状态为降温状态时,就以95℃为基础温度。
13、进一步地,采用升降温过程中的最大温度maxt减去被控对象的目标温度ts的值作为过冲量;其中,设定目标温度在升降温过程中,上下浮动的最大值不超过2℃;
14、把当前时间设置为nt,读取被控对象的实际温度ta,当ts=ta时,将当前时间设置为et,et减去nt的值作为升降温时间。
15、进一步地,分别将低温区间和高温区间升降温速度以及过冲量达到预设值的比例系数kp、积分时间常数ki和微分时间常数kd,进行多项式拟合,拟合系数趋近于1,得到三条多项式系数公式,分别为:
16、kp=a(n)x^n+a(n-1)x^(n-1)+…+a(1)x+a(0)
17、ki=b(n)x^n+b(n-1)x^(n-1)+…+b(1)x+b(0)
18、kd=c(n)x^n+c(n-1)x^(n-1)+…+c(1)x+c(0)
19、其中,每个多项式中n+1个多项式系数a(n)、a(n-1)...a(0),b(n)、b(n-1)...b(0)和c(n)、c(n-1)...c(0)为根据实验过程中各个阶梯温度的kp,ki,kd拟合计算所得,x为被控对象的目标温度ts的值。
20、本发明的有益效果在于:
21、1、通过采集实际温度与目标温度的工作范围和工作状态输出相应功率,从而控制时间温度和目标温度工作在一定范围呢,缩短了进入稳态的时间,降低了超调幅度,提高了温度控制精度。
22、2、无需额外增加温度源,成本低。
23、3、对同一产品进行一次多项式系数拟合计算,可适用所有批次产品。
技术特征:
1.一种改进型pid温度控制方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种改进型pid温度控制方法,其特征在于,4℃到40℃为低温区间,40℃到95℃为高温区间。
3.如权利要求1所述的一种改进型pid温度控制方法,其特征在于,当ta-ts>0时表示降温状态,当ta-ts<0时表示升温状态;其中,ts为被控对象的目标温度,ta为被控对象的实际温度。
4.如权利要求1所述的一种改进型pid温度控制方法,其特征在于,根据所述被控对象的工作范围和当前的工作状态,设置基础温度以及上升/下降的阶梯温度,每次基础温度上升/下降一个阶梯温度并设置为被控对象的目标温度ts;并根据不同被控对象的目标温度ts,设置不同的比例系数kp、积分时间常数ki和微分时间常数kd。
5.如权利要求4所述的一种改进型pid温度控制方法,其特征在于,在低温区间并且为升温状态时,以4℃为基础温度。
6.如权利要求4所述的一种改进型pid温度控制方法,其特征在于,在低温区间并且为降温状态时,以40℃为基础温度。
7.如权利要求4所述的一种改进型pid温度控制方法,其特征在于,在高温区间并且为升温状态时,以40℃为基础温度。
8.如权利要求4所述的一种改进型pid温度控制方法,其特征在于,在高温区间并且状态为降温状态时,就以95℃为基础温度。
9.如权利要求4所述的一种改进型pid温度控制方法,其特征在于,
10.如权利要求1或4所述的一种改进型pid温度控制方法,其特征在于,分别将低温区间和高温区间升降温速度以及过冲量达到预设值的比例系数kp、积分时间常数ki和微分时间常数kd,进行多项式拟合,拟合系数趋近于1,得到三条多项式系数公式,分别为:
技术总结
本发明涉及温度自动控制技术领,公开了一种改进型PID温度控制方法,包括以下步骤:S1、设置被控对象的目标温度以及实时获取被控对象的实际温度,根据被控对象的目标温度把工作范围分为两个阶段分别为低温区间和高温区间;S2、根据被控对象目标温度与被控对象的实际温度的误差正负分为升温和降温两个工作状态;S3、根据被控对象的工作范围和当前的工作状态,匹配不同的多项式算法,得到相应的比例系数、积分时间常数和微分时间常数,以改变温度源输出功率。本发明缩短了温度进入稳态的时间,降低了超调幅度,提高了温度控制精度。无需额外增加温度源,成本低。对同一产品进行一次多项式系数拟合计算,可适用所有批次产品。
技术研发人员:欧阳圣,石国玉,陈功俊
受保护的技术使用者:南京溯远基因科技有限公司
技术研发日:
技术公布日:2024/6/13
- 还没有人留言评论。精彩留言会获得点赞!