一种基于FRAM-STPA方法的民机系统安全主动控制方法及系统
本发明属于fram-stpa方法的民机系统安全主动控制,具体涉及一种基于fram-stpa方法的民机系统安全主动控制方法及系统。
背景技术:
1、随着民机系统向综合化、集成化的方向发展,各个系统之间存在资源共享、信息交互和系统互联影响等安全性问题。传统的安全性分析方法难以全面应对新设计思想下的民机系统安全性分析问题挑战,需要开发适应综合集成化系统特点的安全性分析方法。
2、通过上述分析,现有技术存在的问题及缺陷为:
3、(1)传统方法如fta、hazop和fmea基于事故链模型,采用线性逻辑对系统进行分解,可能忽略非线性交互和微小变化的整体性影响;
4、(2)传统方法将安全性问题转换为系统组件的可靠性问题,容易忽视统计特征不明显的重要危险致因;
技术实现思路
1、为克服相关技术中存在的问题,本发明公开实施例提供了一种基于fram-stpa方法的民机系统安全性分析方法及系统。
2、所述技术方案如下:一种基于fram-stpa方法的民机系统安全主动控制方法及系统,包括以下步骤:
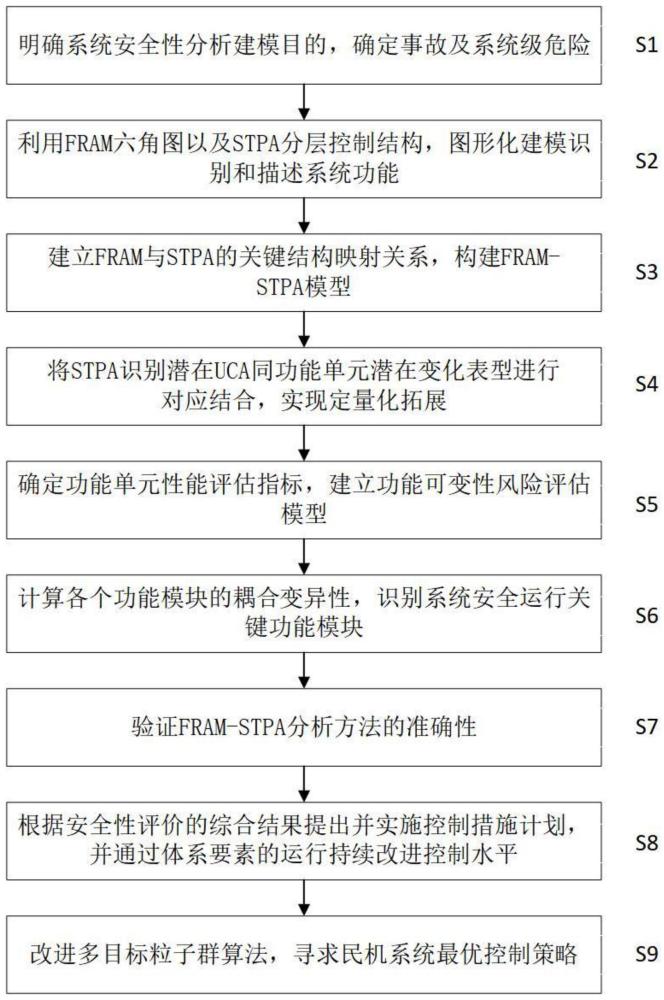
3、步骤1:明确系统安全性分析建模目的,确定事故及系统级危险,对民用飞机系统潜在的各种事故和系统级风险进行准确的定义和识别;
4、步骤2:利用fram六角图以及stpa分层控制结构,图形化建模识别和描述系统功能;
5、步骤3:建立fram与stpa的关键结构映射关系,构建fram-stpa模型,提升对系统风险进行分析的精度;
6、步骤4:将stpa识别潜在uca同功能单元潜在变化表型对应结合,实现定量化拓展;
7、步骤5:确定功能单元性能评估指标,建立功能可变性风险评估模型;
8、步骤6:计算各个功能模块的耦合变异性,识别系统安全运行关键功能模块;
9、步骤7:利用word2vec方法验证fram-stpa分析方法的准确性。
10、步骤8:根据安全性评价的综合结果提出并实施控制措施计划,并通过与原有控制措施进行比较,验证控制措施的效果。
11、步骤9:改进多目标粒子群算法,寻求民机系统最优控制策略。
12、结合上述的所有技术方案,本发明所具备的优点及积极效果为:
13、本发明基于fram-stpa方法的民机系统安全主动控制方法及系统,通过建立fram-stpa综合模型,专注于分析系统内的控制和反馈机制以及它们之间的相互作用,该模块能够有效地映射出stpa定义的系统级风险,这一流程包括对系统内各功能模块的识别、评估其潜在的变化,并基于这些信息构建stamp的因果模型,该模块基于fram方法的六角形图表和stpa方法的融合模型,能够揭示系统内各部分间的控制动作和反馈机制。
14、本发明基于fram-stpa方法的民机系统安全性分析方法及系统,通过包括关键功能部件确定模块,该模块整合了前面提及的各个模块的功能,并通过这些模块的综合分析方法来确定对系统安全有重大影响的功能模块,首先,该模块着手建立民机系统的事故模型,目的是辨识出可能发生的事故和系统层面的风险因子;接着,利用fram方法对民机系统的各项功能进行详细描述,明确地界定了系统功能模块的输入、输出、时间、前提、资源以及控制等关键方面,并依据这些功能单元的上下游关系来构建一个功能共振网络,接着通过构建fram-stpa模型,模块能够映射出stpa定义的系统级风险,并进行民机系统的控制流程与反馈机制的识别和评估,模块对系统的不同模块执行定量分析,以计算出dfi、uoi、gfi和gfa等重要的性能指标,最后,通过对dfi和uoi值最高的功能单元进行深入分析,模块能够确定那些对民机系统安全运行至关重要的关键功能模块。
15、本发明基于fram-stpa方法的民机系统安全性分析方法及系统,包括对比验证分析模块,该模块利用了在飞机运行过程中积累的大量维修记录,结合word2vec词相似度分析模型进行精准度的验证,这些维修记录携带关于系统安全的关键信息,包括故障类型、原因和修复措施等,word2vec模型专门用于分析这些关键词汇之间的语义联系,量化它们的潜在联系,从而揭示词汇之间的相互依赖性。模块通过应用word2vec进行深入的文本分析,从维修记录中提取系统的关键组件信息,计算这些组件与系统类型的相似度,并对这些关键组件进行重要性排序,最终形成一套对比验证实例的分析结果,用于对比验证fram-stpa方法的精确性,具有较高的实用价值。
16、本发明基于fram-stpa方法的民机系统安全性分析方法及系统,包括主动控制策略指定模块,以民机系统为研究对象,建立系统功能组件在一定运行周期内的安全性评估模型,确定其安全控制优先顺序。以安全控制成本最低为目标函数计算单功能组件最优控制周期,以系统安全控制总成本最低为目标建立考虑影响系统运行的关键功能组件的民机系统安全主动控制模型。通过对比两种不同的主动控制策略,对系统的控制措施进行优化改进。
技术特征:
1.一种基于fram-stpa方法的民机系统安全主动控制方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的基于fram-stpa方法的民机系统安全主动控制方法,其特征在于,在步骤1中,明确系统安全性分析建模目的,包括:民机系统建模的目的是为了定义事故并确定系统级危险,事故属于非计划性损失事件,可能涉及人员伤亡及其他重大损失,如任务、设备、财务和信息等。
3.根据权利要求1所述的基于fram-stpa方法的民机系统安全主动控制方法,其特征在于,在步骤2中,利用fram六角图以及stpa分层控制结构,图形化建模识别和描述系统功能,包括:采用六角图形式来描述系统模块的功能特征。在描述民机系统的功能特征时,考虑到民机系统组件之间的耦合和实现功能共振,其六角特征具体内容如下:
4.根据权利要求1所述的基于fram-stpa方法的民机系统安全互动控制方法,其特征在于,在步骤3中,构建fram-stpa模型,包括:通过建立fram-stpa综合模型,专注于分析系统内的控制和反馈机制以及它们之间的相互作用,该模块能够有效地映射出stpa定义的系统级风险,这一流程包括对系统内各功能模块的识别、评估其潜在的变化,并基于这些信息构建stamp的因果模型,该模块基于fram方法的六角形图表和stpa方法的融合模型,能够揭示系统内各部分间的控制动作和反馈机制,为后续识别影响系统安全运行关键功能模块建立模型基础。
5.根据权利要求1所述的基于fram-stpa方法的民机系统安全主动控制方法,其特征在于,在步骤4中将功能单元定量分析,包括:识别民机系统潜在uca及其致因时需要充分考虑系统结构和任务需求,通过系统建模分析系统部件或其子系统的控制反馈和安全性能,识别出系统指定功能下存在的潜在uca及致因,为实现功能风险定量化分析,将uca按照其分类归纳对应为功能单元潜在变化表型,uca划分成可靠性、时序性和持续性三部分,为后续评估功能单元的潜在变化建立基础。
6.根据权利要求1所述的基于fram-stpa方法的民机系统安全主动控制方法,其特征在于,在步骤5中,确定功能单元性能评估指标,建立功能可变性风险评估模型,包括:
7.根据权利要求1所述的基于fram-stpa方法的民机系统安全主动控制方法,其特征在于,在步骤6中,识别系统安全运行关键功能模块,包括:
8.根据权利要求1所述的基于fram-stpa方法的民机系统安全主动控制方法,其特征在于,在步骤7包括对比验证分析模块,该模块利用了在飞机运行过程中积累的大量维修记录,结合word2vec词相似度分析模型进行精准度的验证,这些维修记录携带关于系统安全的关键信息,包括故障类型、原因和修复措施等,word2vec模型专门用于分析这些关键词汇之间的语义联系,量化它们的潜在联系,从而揭示词汇之间的相互依赖性;
9.根据权利要求1所述的基于fram-stpa方法的民机系统安全主动控制方法,其特征在于,在步骤8包括假设民机系统运行控制规划期为[0,qmax],通过最小化运行控制总成本ft,获得民机系统最优主动控制策略,其决策过程如下:
10.根据权利要求1所述的基于fram-stpa方法的民机系统安全主动控制方法,其特征在于,在步骤9包括变异多目标粒子群算法求解,粒子群算法(particle swarmoptimization,pso),该算法较其他智能优化算法而言,求解效率更高,配置的参数更少。在此基础上,coello c等将其扩展到了多目标优化的应用领域中,提出了多目标粒子群算法。在粒子群算法中,种群中各粒子的位置都表示一个模型的可能解,通过模型的适应度函数可以计算得到该粒子当前位置对应的适应度值。在迭代进化的过程中,根据种群的进化历史,各粒子能够追踪各自的个体最优位置以及全局最优位置,动态地更新粒子移动方向及移动距离,从而在一次次的进化中找到模型的非劣解集。
11.一种基于fram-stpa方法的民机系统安全主动控制方法及系统,其特征在于,权利要求1-9任一项所述的基于fram-stpa方法的民机系统安全主动控制方法为其分析系统,该系统包括:
技术总结
本发明属于民机系统安全性分析技术领域,提出了一种基于改进FRAM‑STPA的方法及系统。该方法构建融合模型,实现民机系统图形化功能建模与耦合分析。根据建模得到的功能单元潜在变化表型和系统潜在危险控制动作,生成系统全局功能影响关系,并通过量化功能模块的可变性风险,识别系统安全运行关键功能模块。本发明以民机刹车系统为例展开分析,使用Word2vec挖掘维修文本信息,验证分析结果的准确性;以民机系统为研究对象,建立系统功能组件在一定运行周期内的安全性评估模型,确定其安全控制优先顺序。该发明能够有效识别民机系统中的安全关键功能模块,并辅助制定民机系统主动控制策略,对提高民机系统的安全性具有重要意义。
技术研发人员:贾宝惠,高源,王秋奕,王玉鑫,张勃,陈怡凡,苏家成,张艺宸
受保护的技术使用者:中国民航大学
技术研发日:
技术公布日:2024/8/1
- 还没有人留言评论。精彩留言会获得点赞!