一种无人机控制系统及其控制方法与流程
本发明涉及无人机控制,具体涉及一种无人机控制系统及其控制方法。
背景技术:
1、目前,无人机通过控制端所设定的运行任务来规划多种飞行路径,并依据所确定的飞行路径进行航行完成运行任务,其中:
2、在对无人机依据所确定的运行任务规划飞行路径时,目前可依据迪杰斯特拉算法或贝尔曼-福特算法规划飞行路径,其中:
3、因无人机通常应用于户外,当户外的天气会对环境中的物体造成影响,如环境中的风力会导致其外界所搭设的电缆电线处于偏摆,那么该电线电缆所在的区域就处于风险区域,当无人机飞行经过风险区域时则会与之发生碰撞受损,因此,在通过上述技术方式规划飞行路径时,如何依据户外的天气状态对其所影响的环境进行分析,以在无人机规划飞行路径时,实现对风险区域的规避是目前需要解决的问题。
技术实现思路
1、针对现有技术所存在的上述缺点,本发明提供了一种无人机控制系统及其控制方法,能够有效解决现有技术中在对无人机规划飞行路径时,当户外环境中存在影响特征时,不便于依据影响特征对无人机飞行路径精确规划,以降低飞行风险的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:
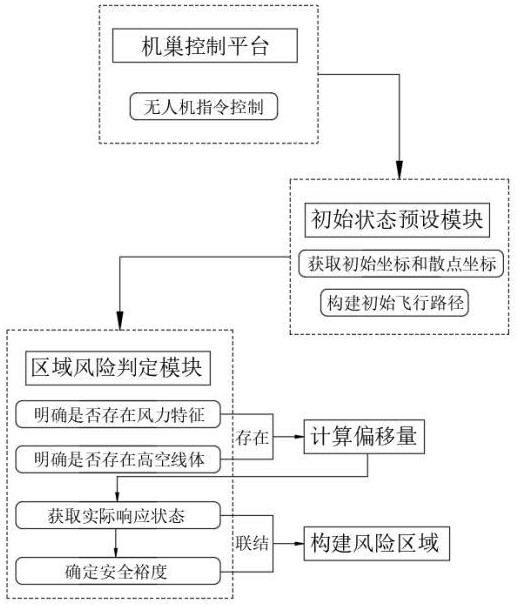
3、本发明提供一种无人机控制系统,包括机巢控制平台,其用于对无人机输入控制指令,还包括:
4、初始状态预设模块,其用于依据最短路径算法对无人机构建初始飞行路径;
5、初始状态预设模块的输出端连接有区域风险判定模块,其用于判断无人机所在的区域是否存在风力特征,存在时:
6、判断该区域下是否存在高空线体,存在时:
7、计算高空线体受风力特征影响时在高空中的偏移量,获取无人机的实际响应状态,将实际响应状态与偏移量结合确定安全裕度,获取高空线体的线体坐标,将安全裕度与线体坐标结合构建风险区域,初始状态预设模块以规避风险区域重新构建初始飞行路径;
8、以及,状态监控模块,其用于获取异常无人机,并预测该异常无人机所产生的碰撞范围及确定调控无人机,结合碰撞范围对调控无人机的初始飞行路径重新构建,并通过机巢控制平台修改调控无人机的初始飞行路径。
9、进一步地,所述初始状态预设模块依据最短路径算法构建初始飞行路径的方法为:
10、获取无人机当前的初始坐标和任务区的散点坐标,且获取任务区的先后顺序,以确定散点坐标的先后顺序;
11、最短路径算法依据初始坐标和先后顺序确定的散点坐标构建初始飞行路径。
12、进一步地,所述高空线体存在时,对高空线体进行多段等分,以确定出不同的线体坐标。
13、进一步地,高空线体偏移量的计算公式为:
14、式中,为高空线体受到风力特征影响时的偏移量,为高空线体的张力,为高空线体不受风力特征影响下的长度,为高空线体的杨氏模量,为高空线体的横截面积,为影响高空线体偏移的风速,为空气密度,为高空线体的阻力系数,为高空线体迎风的横截面积。
15、进一步地,所述安全裕度的计算公式为:
16、式中,为安全裕度,为无人机在触发风险情况的反应时间下的飞行距离,,为飞行速度,为反应时间,为无人机触发风险情况最小转弯半径所需要的距离,,为无人机转弯前的速度,为无人机的最小转弯半径,为无人机的最大减速度,为额外的缓冲距离;
17、所述实际响应状态包括。
18、进一步地,所述风险区域的构建方法为:
19、获取当前的线体坐标,因安全裕度为直线距离数值,且安全裕度在线体坐标上存在多个方向,预先定义安全裕度的方向向量,并进行向量加法:式中,为风险坐标,表示向量加法,为模长;
20、由此构建风险坐标集合,其中:
21、在风险坐标集合内确定风险坐标与其对应的线体坐标之间距离最大的风险坐标,标记为目标风险坐标;
22、根据高空线体的长度,以将线体坐标分别设定为圆心基点,目标风险坐标与对应的线体坐标之间的距离为半径构建多个不同的圆形区域;
23、根据高空线体的长度对多个圆形区域进行同向延展连接,以构建风险区域。
24、进一步地,所述异常无人机的确定方法为:
25、通过监测区域下所有无人机的运行数据,运行数据包括无人机当前的飞行坐标及历史飞行路径;
26、获取无人机所预设的初始飞行路径以及当前的飞行坐标,判断无人机是否偏离预设的初始飞行路径,当偏离时,则将该无人机标记为异常无人机。
27、进一步地,所述异常无人机确定后,获取偏离初始飞行路径的时间以明确异常无人机的偏移路径,确定异常无人机的偏移路径是否呈线性变化状态,当呈线性变化状态时,执行如下步骤:
28、获取异常无人机偏离初始飞行路径的时间与当前持续偏离之间的时间并标记为偏离时间;
29、获取偏离时间下异常无人机分别对应的时间序列三维坐标,并转换为二维的平面坐标;
30、通过线性回归模型结合平面坐标以预测异常无人机在不同时间下的偏移位置;
31、获取正常飞行的无人机并标记为安全无人机,获取安全无人机在不同时间下所处的坐标位置,判定与异常无人机偏移位置碰撞的安全无人机并将此安全无人机标记为调控无人机;
32、获取安全阈值,以异常无人机在对应时间所处的坐标位置结合安全阈值构建碰撞范围,以对调控无人机重新构建初始飞行路径。
33、进一步地,所述调控无人机构建初始飞行路径时,执行如下条件:
34、获取安全无人机的初始飞行路径,基于安全阈值对碰撞范围和安全无人机的初始飞行路径进行规避,以对调控无人机单体构建初始飞行路径。
35、还提供了一种无人机控制方法,该方法根据所述的一种无人机控制系统予以实现。
36、本发明提供的技术方案,与已知的现有技术相比,具有如下有益效果:
37、通过结合气象数据与高空线体,以计算出受影响的偏移量,从而明确出区域下会对无人机飞行造成影响的风险区域,以使初始状态预设模块能够在对无人机构建初始飞行路径时,以降低后续无人机飞行过程中受到阻碍风险的概率,便于无人机执行对应的巡视作业。
技术特征:
1.一种无人机控制系统,包括机巢控制平台,其用于对无人机输入控制指令,其特征在于,还包括:
2.根据权利要求1所述的一种无人机控制系统,其特征在于,所述初始状态预设模块依据最短路径算法构建初始飞行路径的方法为:
3.根据权利要求1所述的一种无人机控制系统,其特征在于,所述高空线体存在时,对高空线体进行多段等分,以确定出不同的线体坐标。
4.根据权利要求1所述的一种无人机控制系统,其特征在于,所述高空线体偏移量的计算公式为:
5.根据权利要求4所述的一种无人机控制系统,其特征在于,所述安全裕度的计算公式为:
6.根据权利要求5所述的一种无人机控制系统,其特征在于,所述风险区域的构建方法为:
7.根据权利要求1所述的一种无人机控制系统,其特征在于,还包括:
8.根据权利要求7所述的一种无人机控制系统,其特征在于,所述异常无人机确定后,获取偏离初始飞行路径的时间以明确异常无人机的偏移路径,确定异常无人机的偏移路径是否呈线性变化状态,当呈线性变化状态时,执行如下步骤:
9.根据权利要求8所述的一种无人机控制系统,其特征在于,所述调控无人机构建初始飞行路径时,执行如下条件:
10.一种无人机控制方法,其特征在于,该方法根据权利要求1所述的一种无人机控制系统予以实现。
技术总结
本发明涉及无人机控制技术领域,具体涉及一种无人机控制系统及其控制方法。包括机巢控制平台,其用于对无人机输入控制指令,还包括:初始状态预设模块,其用于对无人机构建初始飞行路径;以及,状态监控模块,其用于获取异常无人机及调控无人机,通过机巢控制平台修改调控无人机的初始飞行路径。通过结合气象数据与高空线体,以计算出受影响的偏移量,从而明确出区域下会对无人机飞行造成影响的风险区域,以使初始状态预设模块能够在对无人机构建初始飞行路径时,以降低后续无人机飞行过程中受到阻碍风险的概率,便于无人机执行对应的巡视作业。
技术研发人员:游忠川,张立超,王吉林,王军,张枨枨,管竟尧
受保护的技术使用者:山东字节信息科技有限公司
技术研发日:
技术公布日:2024/6/2
- 还没有人留言评论。精彩留言会获得点赞!