一种无人系统集群协同模式反演辨识方法
本发明属于模式识别与智能系统,尤其涉及一种无人系统集群协同模式反演辨识方法。
背景技术:
1、在无人系统集群中,协同模式决定了各无人系统的行为决策(或控制律)。反演辨识集群的协同模式,可以解释、预测或模仿其行为,实现经验知识建模或迁移,还可以应用于“人在回路”智能。
2、现有反演辨识方法多种多样,其中逆最优控制方法具有高效、可靠、可解释等优势,但典型的逆最优控制方法往往只考虑观测噪声或过程噪声,难以同时兼顾两者,或对噪声的统计特性有较强的假设。集群时变行为决策的协同模式识别,通常依赖于闭环信息结构的反演算法,但现有的闭环反演算法一般假设性能指标函数中的一次项已知(或者可忽略),对含未知意图的动态智能系统辨识效果不理想。
3、因此,亟需一种先进的识别方法对无人系统集群协同模式进行反演辨识。
技术实现思路
1、为克服相关技术中存在的问题,本发明提出一种无人系统集群协同模式反演辨识方法,该方法能够实现决策权重与目标状态的联合反演辨识。
2、实现本发明的技术方案如下:
3、一种无人系统集群协同模式反演辨识方法,具体过程为:
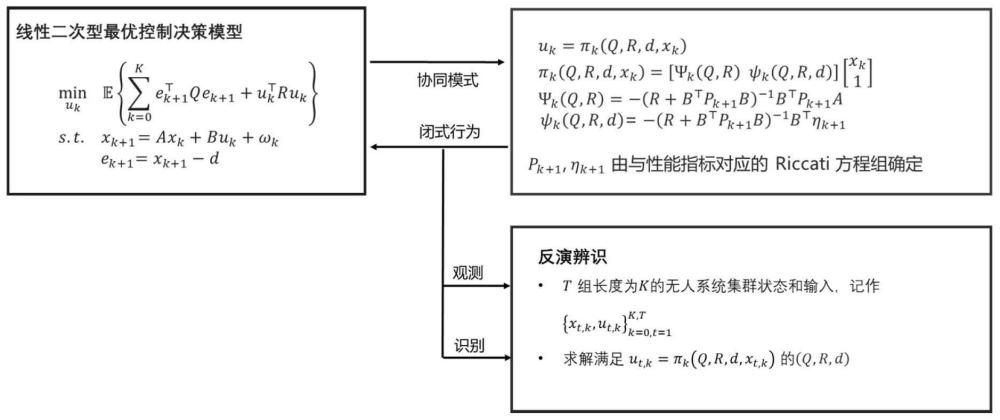
4、采集无人系统集群的状态和输入,并基于系统动力学参数,构建二次型性能指标最优控制决策模型,获得所述二次型性能指标最优控制决策模型对应的线性方程组,基于所述方程组解出权重矩阵和目标状态;
5、所述二次型性能指标最优控制决策模型基于目标状态进行构建,所述目标状态dk+1表示为:
6、
7、
8、
9、其中,表示目标状态的系统矩阵和激励矩阵,表示定常输入,表示目标状态转移矩阵,d0表示目标状态初值。
10、进一步地,本发明二次型性能指标最优控制决策模型为:
11、
12、将意图向量qk+1表示为:qk+1=-qdk+1;
13、其中,是无人系统集群的状态和输入,q,r是权重矩阵;
14、xk+1=axk+buk+wk
15、其中,a,b是系统动力学参数,wk表示均值为零、二阶矩有界的过程噪声。
16、进一步地,本发明二次型性能指标最优控制决策模型为:
17、
18、ek+1=xk+1-dk+1,k=0,1,…,k
19、其中,是无人系统集群的状态和输入,q,r,是权重矩阵。
20、xk+1=axk+buk+wk
21、其中,a,b是系统动力学参数,wk表示均值为零二阶矩有界的过程噪声。
22、进一步地,本发明所述线性方程组为riccati线性方程组,具体表示为:
23、
24、式中,ηk+1是中间变量,当k=k的时候ηk+1=qk+1。
25、进一步地,本发明在基于所述方程组解出权重矩阵、目标状态初值及定常输入,然后求解出目标状态dk+1。
26、进一步地,本发明所述在求解方程组的基础上,所述最优控制决策模型的闭式解表示为
27、
28、
29、
30、pk+1=q,ηk+1=qk+1
31、可选的,本发明所述最优控制决策模型的闭式解中,将所述更新为
32、有益效果:
33、第一,本发明对目标状态的表示方式进行设计,给出了动态一次项参数的通用辨识方法,能够处理某些含有未知时变目标的系统。
34、第二,本发明能实现决策权重与目标状态的联合反演辨识,适用范围更广,能处理无人系统集群含未知意图信息的情形。
35、第三,本发明能兼顾观测噪声与过程噪声的影响,在它们均值为零且二阶矩有界的情况下,不依赖噪声的其他先验知识就能得到统计一致的理论结果。
36、第四,本发明是一种线性方法,能提供高精度的结果,计算速度优于传统方法。
技术特征:
1.一种无人系统集群协同模式反演辨识方法,其特征在于,具体过程为:
2.根据权利要求1所述无人系统集群协同模式反演辨识方法,其特征在于,二次型性能指标最优控制决策模型表示为:
3.根据权利要求1所述无人系统集群协同模式反演辨识方法,其特征在于,二次型性能指标最优控制决策模型表示为:
4.根据权利要求2或3所述无人系统集群协同模式反演辨识方法,其特征在于,所述线性方程组为riccati线性方程组,具体表示为:
5.根据权利要求4所述无人系统集群协同模式反演辨识方法,其特征在于,在基于所述方程组解出权重矩阵、目标状态初值及定常输入,然后求解出目标状态dk+1。
6.根据权利要求4所述无人系统集群协同模式反演辨识方法,其特征在于,所述在求解方程组的基础上,所述最优控制决策模型的闭式解表示为
7.根据权利要求6所述无人系统集群协同模式反演辨识方法,其特征在于,所述最优控制决策模型的闭式解中,将所述更新为
技术总结
本发明提供一种无人系统集群协同模式反演辨识方法,具体过程为:采集无人系统集群的状态和输入,并基于系统动力学参数,构建二次型性能指标最优控制决策模型,获得所述二次型性能指标最优控制决策模型对应的线性方程组,基于所述方程组解出权重矩阵和目标状态;该方法能够实现决策权重与目标状态的联合反演辨识。
技术研发人员:俞成浦,李尧,程仁硕,方浩,邓方,陈杰
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/9/29
- 还没有人留言评论。精彩留言会获得点赞!